SETI Park@seti_park
🚨 @TESLA’S NEW PATENT BRINGS F1-GRADE STEERING TO THE ROADSTER 🏎️
Tesla has set the end of April 2026 as the Roadster unveiling date, with production following 12 to 18 months later. In February 2024, Musk wrote on X that the production car would include “steer-by-wire similar to the Cybertruck.” A Don Lemon interview the same year added a second detail: the car would have “a drive-by-wire yoke, kind of like the way aircraft are controlled.” Those two statements describe a feedback actuator inside a yoke-style column, with no mechanical connection to the front wheels.
That actuator has a physical stop at each end of its rotation range. The stop defines how far the driver can turn before the hardware runs out of travel. On the Cybertruck, that limit sits at roughly ±170 degrees from center [0002]. A conventional sports car with a mechanical rack allows the wheel to travel approximately ±360 to ±450 degrees before reaching full lock. That gap is a hardware constraint, not a software setting.
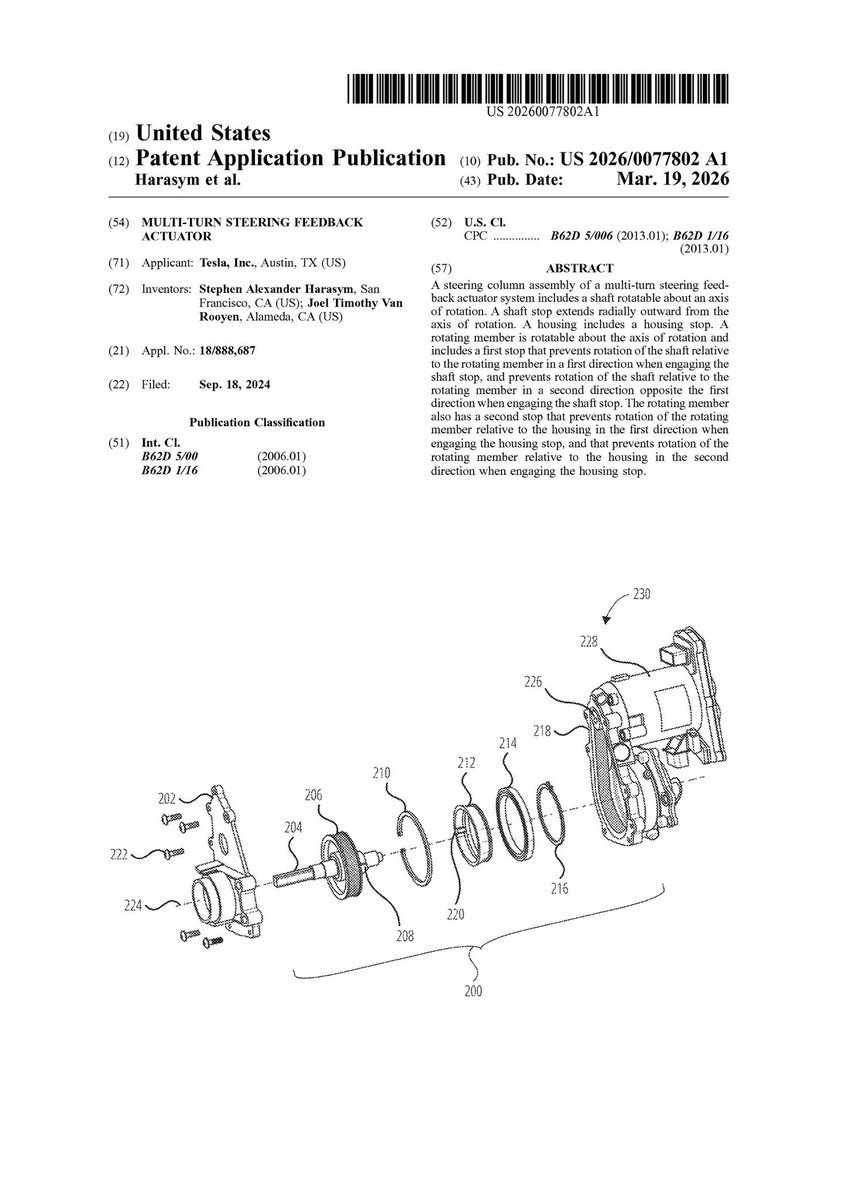
In September 2024, Tesla filed US 20260077802 A1, titled “Multi-Turn Steering Feedback Actuator.” The inventors are Stephen Alexander Harasym (San Francisco, CA) and Joel Timothy Van Rooyen (Alameda, CA), assigned to Tesla, Inc. The application describes a steering column assembly that extends the physical stop range to approximately ±340 degrees [0003].
Figure 1. FIG. 2 (US 20260077802 A1): Exploded view of the steering column assembly. The shaft stop (208) and rotating member (212) carry the entire mechanical logic of the invention. The housing (218) and actuator (226) complete the system. The assembly contains fewer distinct parts than a standard power steering pump.
A road car’s front wheels turn through a fixed physical arc before the suspension geometry runs out of range. On a typical sports car, that arc is roughly ±35 degrees from center. If the feedback actuator allows only ±170 degrees of hand travel, the maximum achievable steering ratio is 170 divided by 35, approximately 4.9:1. An F1 car, with roughly ±180 degrees of hand travel and front wheel travel of approximately 17 degrees at a standard circuit, achieves a ratio near 10.6:1. Most sports cars sit between 12:1 and 15:1.
A ratio of 4.9:1 is fast. Multiple journalists noted that the Cybertruck’s steer-by-wire felt disorienting in the first minutes of driving, requiring a period of adjustment before inputs felt predictable. The hardware range ceiling, not the software calibration, sets that ratio. This ratio analysis is analyst inference from physical geometry; the patent mentions neither steering ratios nor F1.
The patent describes the existing limit directly. Conventional steer-by-wire systems use “mechanical pins or stoppers within the housing,” producing a ceiling “commonly around ±170 degrees from the center position” [0002]. The ceiling is set at manufacture.
The rotating member is the invention [0053].
The assembly has three components that matter: the shaft (the driver’s input), the rotating member (a stop ring sitting around the shaft inside the housing), and the housing (fixed to the vehicle). The shaft carries a shaft stop extending radially outward [0051]. The rotating member carries two stops: one facing inward toward the shaft, one facing outward toward the housing. The housing carries a housing stop on its interior wall.
Figure 2. FIG. 7A (US 20260077802 A1): Cross-section at the shaft-rotating member interface (line A-A of FIG. 6). The shaft stop (208) and first stop (220) define Stage 1 of the travel limit. The dashed arc shows the angular range the shaft sweeps freely before contact occurs.
Figure 3. FIG. 7B (US 20260077802 A1): Cross-section at the rotating member-housing interface (line B-B of FIG. 6), axially displaced from FIG. 7A. The second stop (512) and housing stop (604) define Stage 2. Read alongside FIG. 7A, the two figures show the complete two-stage architecture at identical scale.
When the driver turns the shaft in one direction, it sweeps freely through a first arc until the shaft stop contacts the first stop of the rotating member [0086]. Any further rotation in the same direction causes the rotating member to turn with the shaft. The rotating member then sweeps a second arc until its second stop contacts the fixed housing stop [0089]. At that point, neither component can rotate further [0099]. Both stages lock simultaneously.
The total travel is the sum of both arcs. Each arc spans up to nearly 360 degrees, minus the angular width of the contact zone between the two stop surfaces. The patent calls this width the stopped arc, approximately 30 degrees in the illustrated example, configurable between 10 and 170 degrees [0150]. Two 30-degree contact zones subtracted from two full 360-degree sweeps yields a maximum shaft travel of approximately ±340 degrees [0153]. A designer can tune the contact zone width to set the total travel to any value between roughly ±170 and ±340 degrees [0004]. Applied to ±35 degrees of front wheel travel, the ±340-degree maximum produces a ratio of approximately 9.7:1, within the F1 range.
The patent also addresses the feel of the stop. A hard metal-to-metal contact creates an abrupt limit. US 20260077802 A1 places a polymer O-ring on one or more of the four contact surfaces, retained in a groove and protruding outward to absorb impact before the underlying metal surfaces meet [0085, 0115, 0116]. The patent describes the intended result as “a softer, more premium feel when reaching the end stops” [0004].
Figure 4. FIG. 10 (US 20260077802 A1): Partial view with the housing cut away. Both stop surfaces carry O-rings (602) seated in grooves. The axial separation between the two stop pairs is visible in the depth of the assembly.
The patent claims three distinct forms of protection. Claim 1 covers the steering column assembly as a physical structure. Claim 8 covers the operating sequence as a method. Claim 14 covers the full system, including the actuator coupled to the shaft by a drive mechanism. That three-part structure allows the patent to reach subassembly suppliers separately from complete-system integrators.
The specification states the assembly can be used with any powertrain or propulsion system [0045]. The independent claim places no limit on rotation angles, materials, or drive mechanism type.
The ±340-degree upper limit of the illustrated embodiment sits near the outer edge of Claims 3 and 16, which require total shaft travel of at least 540 degrees between end positions. The specification also describes a path beyond the current design: adding a third rotating member extends the range to ±510 degrees or more using the same stacking logic [0121].
The Roadster’s steering yoke presents the driver with less angular range than a round wheel. The feedback actuator’s physical stop defines the outer boundary of the driver’s entire input space. At ±170 degrees, a yoke user reaches the stop within a single wrist rotation in each direction. At ±340 degrees, the available travel doubles and the ratio moves from a fast truck configuration toward the range of a sports car with a conventional rack.
Whether this specific assembly appears in the Roadster is not confirmed by the patent or any Tesla disclosure. The connection is analyst inference from application and timing. The patent was filed in September 2024, months after Musk’s public confirmation of the Roadster’s steer-by-wire system. What the Cybertruck established is that full steer-by-wire is manufacturable and certifiable without a mechanical backup. What US 20260077802 A1 adds is the physical range that maps that system onto a car where steering feel is the product.
The question of how a driver should experience a limit that was not there before turns out to have a hardware answer. 🤔
🖼️ Key figures
[FIG. 2: Exploded view of the steering column assembly. Shows the full component set: shaft (204), shaft stop (208), rotating member (212), bearing (214), housing (218), and actuator (226). Establishes the scale and part count of the invention.]
[FIG. 7A: Cross-section through line A-A. Shows the shaft stop (208) and first stop (220) of the rotating member. Defines Stage 1 of the two-stage travel limit.]
[FIG. 7B: Cross-section through line B-B, axially displaced from FIG. 7A. Shows the second stop (512) of the rotating member and housing stop (604). Defines Stage 2. Read alongside FIG. 7A: the two planes together describe the complete mechanism.]
[FIG. 10: Partial assembly view with housing cut away. Shows O-rings (602) seated in grooves on both stop surfaces. Confirms the axial separation between Stage 1 and Stage 2 contact zones.]
🗂️ Sources
- US 20260077802 A1, “Multi-Turn Steering Feedback Actuator.” Tesla, Inc. Filed September 18, 2024. Published March 19, 2026. Inventors: Stephen Alexander Harasym; Joel Timothy Van Rooyen. Classification: B62D5/00; B62D1/16.
- Elon Musk, post on X, February 2024. Confirmed Roadster steer-by-wire and yoke.
- Don Lemon interview with Elon Musk, 2024. Roadster yoke described as “a drive-by-wire yoke, kind of like the way aircraft are controlled.”
- The Drive, Cybertruck steer-by-wire review, 2024. Reported initial disorientation in first minutes of driving.
- GTPlanet forum, F1 steering angle discussion, citing F1 engineering sources. Standard F1 front wheel steering lock: 17 degrees. Monaco-specific extended setting: 21 degrees.