Sabitlenmiş Tweet

Excited to officially announce our strategic collaboration with MaprGo —— an AI-native mapping infrastructure company.
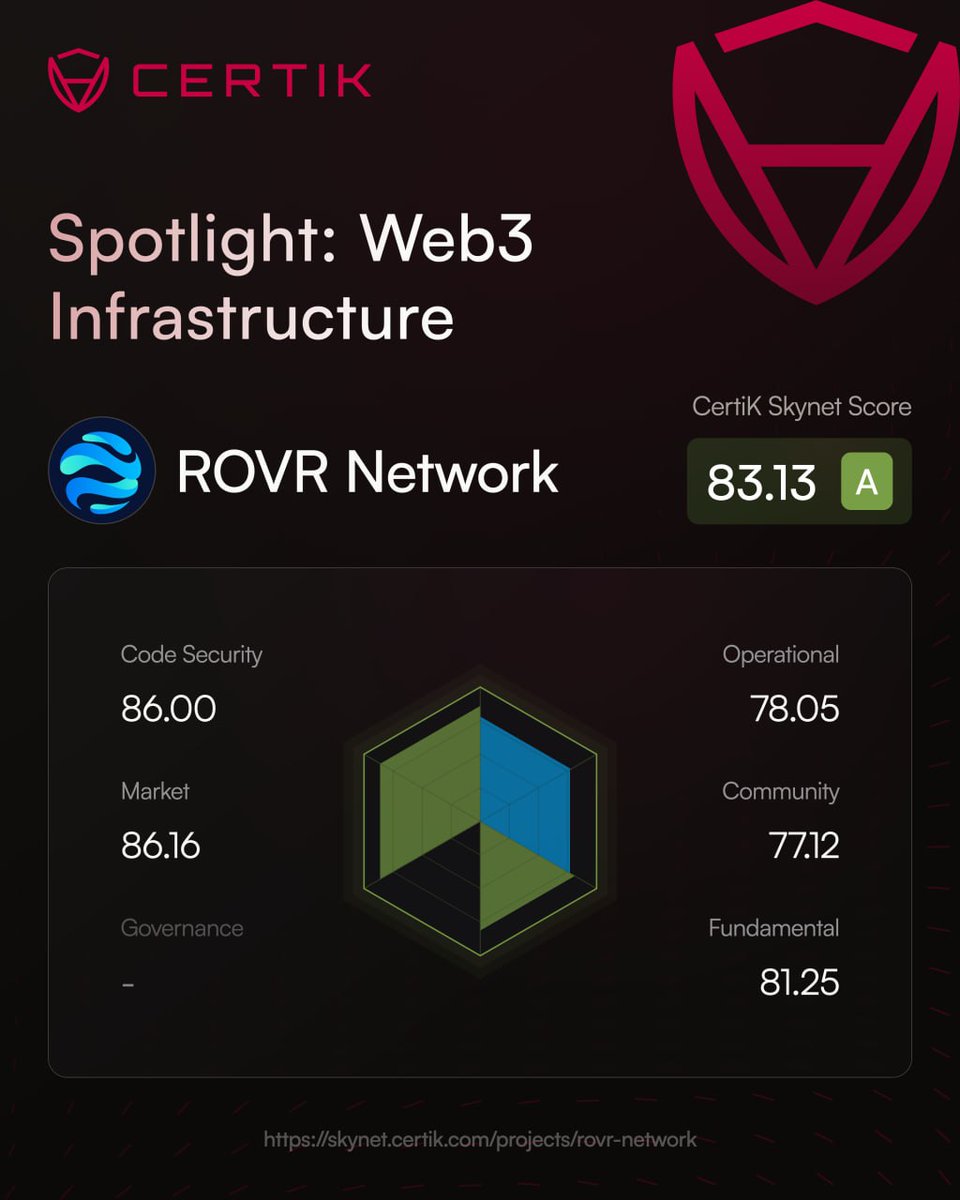
ROVR captures the physical world.
MaprGo understands it.
Together, we're closing the loop between physical sensing and semantic understanding, and building the pipeline that turns real-world data → spatial intelligence → world models.
The infrastructure layer for Spatial AI is coming online.
@maprgo/maprgo-and-rovr-network-are-joining-forces-to-build-the-foundational-spatial-intelligence-0d65af434319" target="_blank" rel="nofollow noopener">medium.com/@maprgo/maprgo…
English