Sabitlenmiş Tweet
わたこ
3K posts


わたこ
@WatakoLab
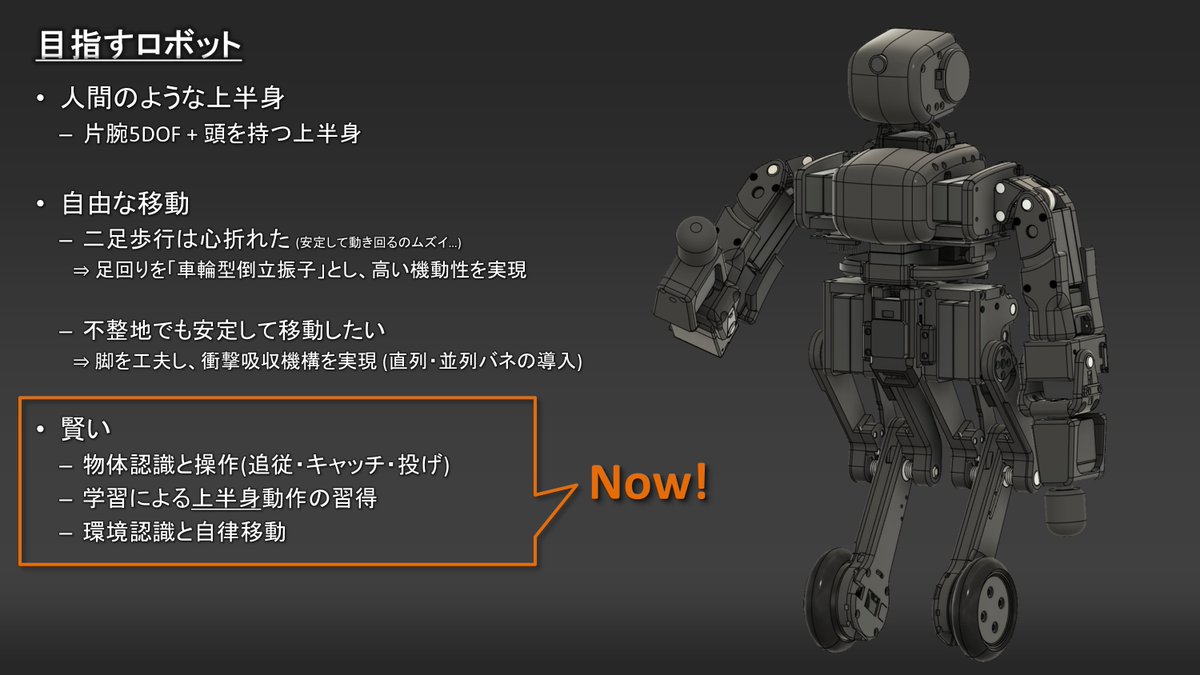
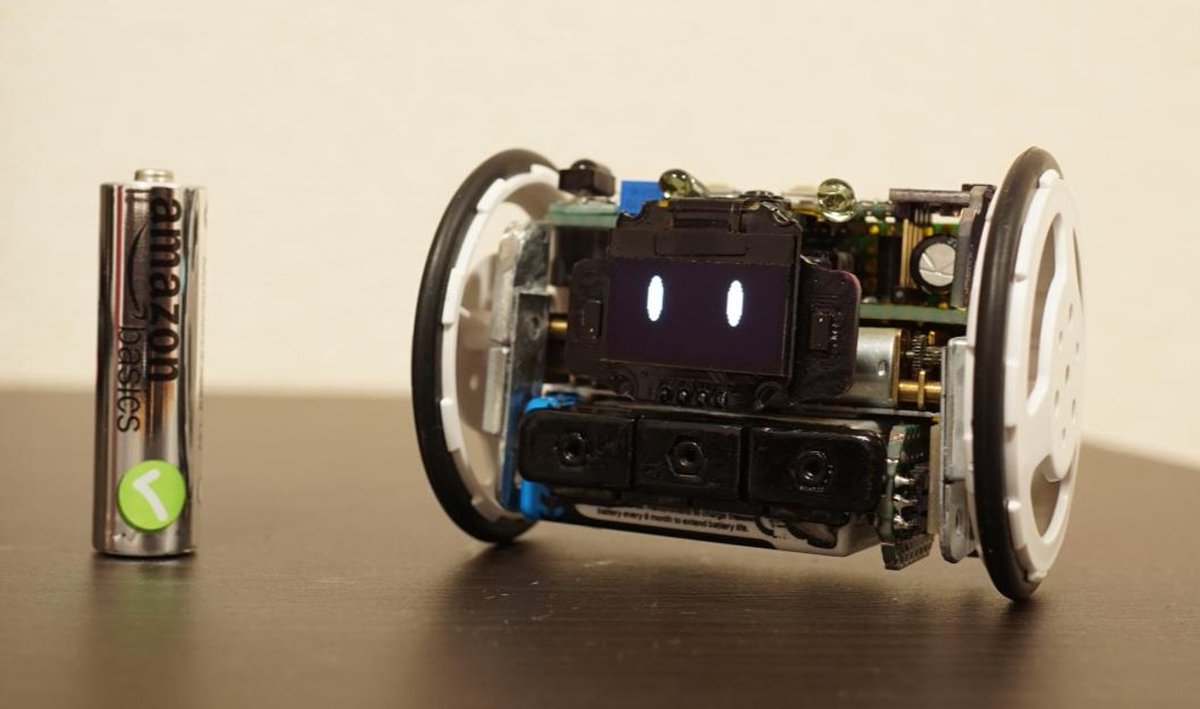
趣味ロボ、今は倒立振子ロボをば。人間らしい動きの実現を目指しています。中の人のやる気によってアイコンが度々変わります。
Katılım Kasım 2017
576 Takip Edilen14.5K Takipçiler



@WatakoLab こんにちは!
いつもわたこさんのポストを楽しみにしています(^_^)
「久々にやる気出ている」とのことでワクワクしますw
ところで質問があります。Roller485のD3504をGB3506に変更しているのはトルクを増やすためですか?GB3506に変更してもファームウェアの修正なしで使えますか?
日本語

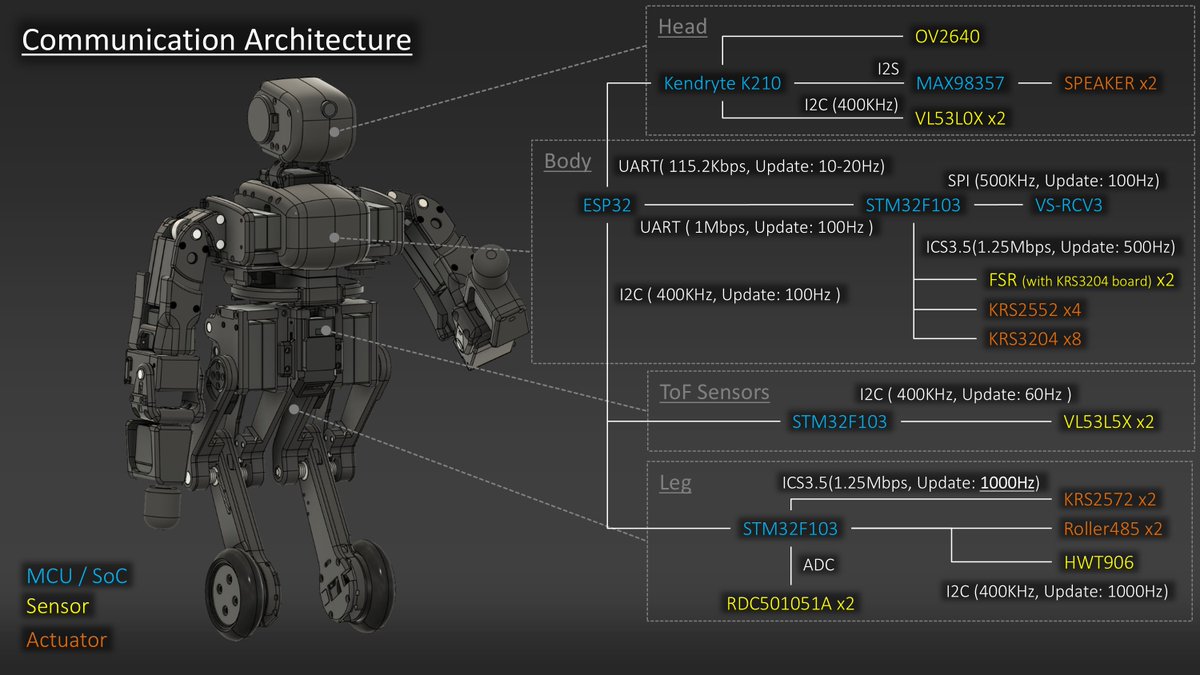
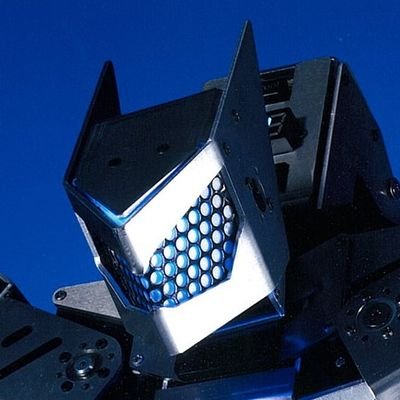
@duncancalvert ありがとうございます。K210上で、Lab色空間における閾値処理を用いて赤色領域を検出しています。現状では、YOLOのような学習ベースの認識は使用していません。(K210で扱うことも可能ですが、fpsが落ちます)
日本語
@WatakoLab Very nice work. Impressive frequency and latency. What detector do you use for the ball? We do a similar algorithm with YOLOv8 and ZED. We could track the 3D position of colored tennis balls just like this.
English

わたこさんのホッパーくんのみたいだなーと思って久しぶりにみにいったら、上半身がついてたわ😳
x.com/watakolab/stat…
すっごい。
Space and Technology@spaceandtech_
Researchers at RAI Institute have unveiled Roadrunner, a 15 kg bipedal wheeled robot that can drive and step using multiple movement modes. Its legs bend at the knees to avoid obstacles, while a single control system smoothly manages all movements. The robot can also stand up from different positions and even balance on one wheel without extra training.
日本語

自分も早く倒立振子型双腕マニピュレータにパンチルト機構+深度カメラを載せて似たようなタスクをやらせたいです!(ハード作るだけで少し時間掛かりそうですが…).自己増殖型ファジィSNNとウイルス進化学習型ファジィ制御器で動的未知環境への適応性を極限まで上げていきたいです.
わたこ@WatakoLab
トラッキングの追従性と安定性、どちらもいい感じになってまいりました!
日本語






わたこ retweetledi

非常にレアな動画なのですが、
国産ヒューマノイドが最新のフィジカルAI(強化学習)で歩いている様子を公開します。
チューニングがまだ少し甘くてフラついてますが、身体に対して足裏がここまで小さい(これがムズい)ヒューマノイドは日本国内にほぼ無いかもしれません。
日本語

@WatakoLab こういうの作れる方尊敬します。
3Dプリンターでパーツ作ったりやArduinoで簡単なプログラム作成くらいは出来るので、データやソフトウェアの販売とかしてもらえないでしょうか?
日本語
@tsuruhiro0805 理由は主に2点で、
1.屈曲時でも前方の空間が空くこと
2.腕を前方に出した際に重心が丁度車輪上部に来るため、前方作業時に直立姿勢を保ちやすいこと
あたりかなぁ、と考えています。
x.com/i/status/20254…
わたこ@WatakoLab
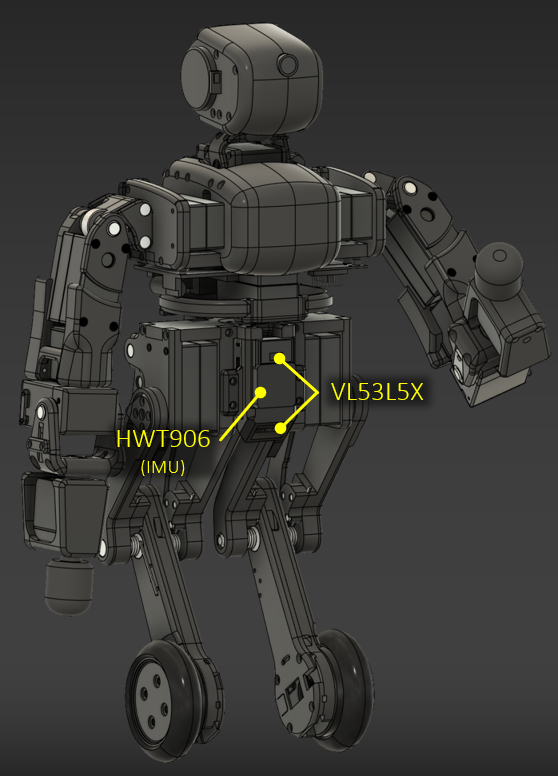
動的な重心計算の適用をば。 重心に合わせて上体の目標傾きを制御することで、その場にとどまろうとします。 あと、頭もついたよ。
日本語
