ASTRM
22 posts


ASTRM
@astrm_labs
ASTRM Intelligence Labs


@uddupa @astrm_labs crazy , how can i learn and get into SLAM?



Building SpatialAI @astrm_labs

we are moving at breakneck speed at @astrm_labs building agentic orchestrator for critical infra...
Had a lovely sprint here at @astrm_labs over the last 36 hours. From unpacking servo motors, through designing CAD models for the turret frame, 3D printing the components, powering up the system, writing a firmware and driver, bringing it on the ASTRM operating system, to getting it to following targets using a vision pipeline - loved every moment of it. Still a long journey ahead, but off to an invigorating start!
The draft Defence Aquisition Procedure 2026 just dropped and it feels like a gift! 🚀 I started @astrm_labs with this year, with my friend @uddupa , with a singular focus: doing the heavy lifting on IP creation for emerging defense tech. I took this plunge on the conviction that what the Indian defense industry needs isn't more licensed assembly lines, but true Design Authority. We’re realizing this by building a high-caliber team of the finest engineers and designers - people who want to own the source code and the core architecture, not just follow a foreign blueprint. The draft DAP2026 is a strong validation for our thesis. It totally shows a doctrinal shift on the MoD’s side - moving its primary metric of success from "Made in India" (manufacturing localization) to "Owned by India" (IP ownership and design sovereignty). The pivot is clear - DAP 2020: Indigenization. It rewarded you for manufacturing a foreign gun using Indian steel and labor. DAP 2026: Sovereignty. It rewards you if you own the Source Code, the Gerber Files, and the Algorithms. It explicitly separates "License Production" from true indigenization. Huge win for deep-tech. 🇮🇳 Will follow up with a thread on my biggest takeaways for deep-tech startups building 'Owned by India' IP.





built a custom video-gen pipeline for drones for making a custom low latency drone detection + tracking + future trajectory prediction pipeline with 3D reconstruction. based on modern stack involving @roboflow and @ultralytics for custom data pipeline and model building and @rerundotio for visualisation...
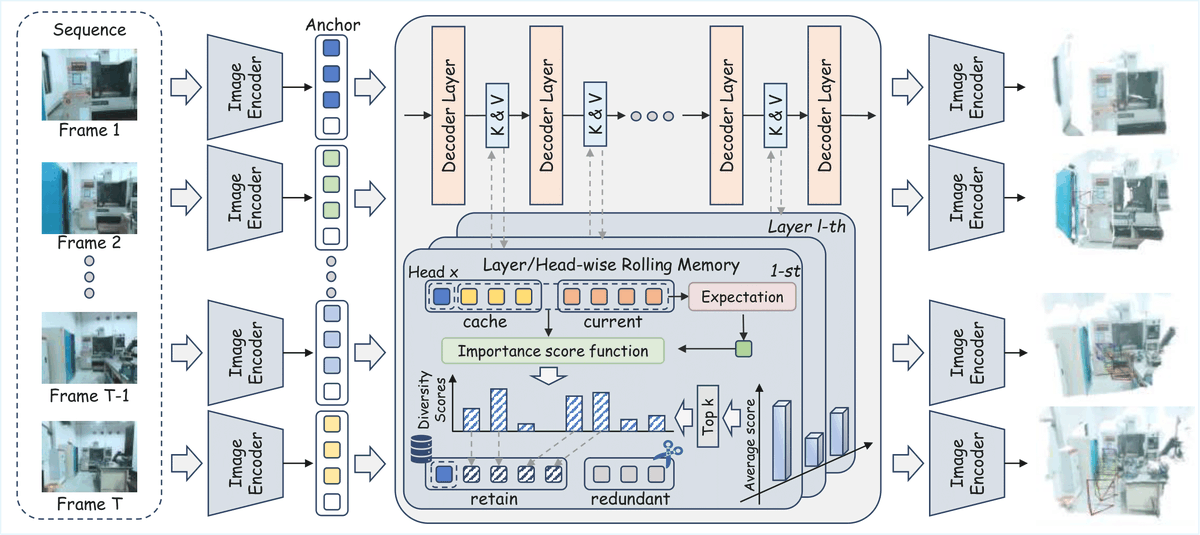
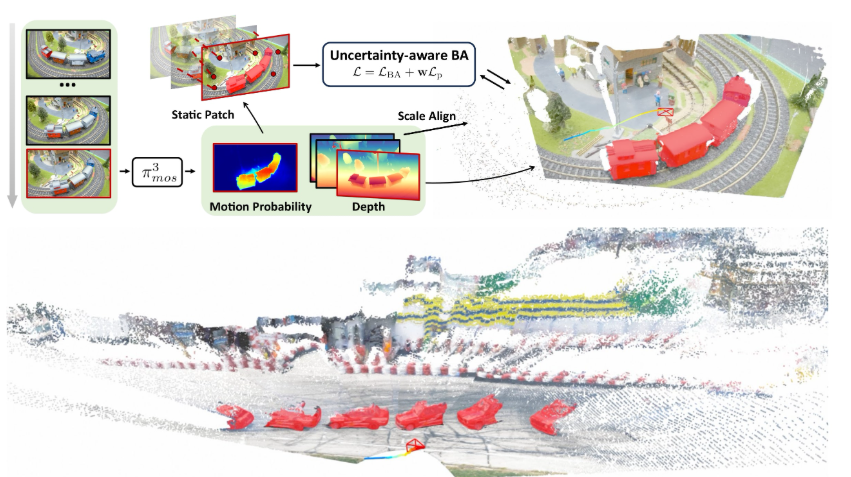
Live monocular 3D reconstruction from camera feed, with multi-frame stitching and relative positioning (frame buffer of 4)... running on M3 mac cpu at 24fps... visualised using @rerundotio next up... realtime semantic navigation in 3d space...