Sabitlenmiş Tweet
Xingxin HE
206 posts


Xingxin HE
@iamhxx
PhD student in Robotics @hkust ; Ex software engineer @autodesk
🌏 Katılım Şubat 2011
104 Takip Edilen17 Takipçiler
Love the work by @danielpmorton !
Marco Pavone@drmapavone
Introducing FRAX: Fast Robot Kinematics and Dynamics in #JAX — to be presented at the 2026 IEEE International Conference on Robotics and Automation (ICRA) Frontiers of Optimization for Robotics (FOR) Workshop. FRAX delivers extremely fast (low-microsecond) execution for common inverse-kinematic and inverse-dynamic control workloads, with a pure Python codebase that can achieve up to 5× faster performance than MuJoCo or Pinocchio Python bindings in several settings. At the same time, FRAX is fully differentiable and seamlessly compatible with CPU, GPU, and TPU execution through #JAX — enabling scalable workflows spanning robotics, control, planning, and machine learning. Our broader goal is to help bridge the gap between modern AI tooling and robotics computation, making it easier to develop scalable #Physical #AI systems. This also makes FRAX a great complement to CBFPY (github.com/StanfordASL/cb…), our package for robot safety and control barrier functions. Kudos to @danielpmorton for leading this effort. If you’ll be at ICRA, reach out! The FOR Workshop is on Monday, June 1, and we’ll have a poster there. 💻 GitHub: github.com/StanfordASL/fr… 📄 Paper: arxiv.org/pdf/2604.04310 #Robotics #PhysicalAI #JAX #DifferentiablePhysics #MachineLearning #AutonomousSystems #GPU #Simulation #ICRA
English

The community didn't wait for us.
Before we even released code for fine-tuning, training, and inference, builders were already deploying MolmoAct2 in the wild. So we're shipping faster.
Today: official LeRobot integration for MolmoAct2.
Train, evaluate, and deploy with standard LeRobot datasets and workflows — bring your own task, bring your own embodiment.
→ github.com/allenai/molmoa…
Can't wait to see what you build.
Jiafei Duan@DJiafei
Most capable generalist robotics models today are closed or at best, open weights. But robotics won’t reach its ChatGPT moment without real openness. That GPT moment was built on years of open tools and datasets such as Python, PyTorch, ImageNet and more, that let researchers inspect, reproduce, and build. Today, we’re introducing MolmoAct 2: a fully open-source action reasoning model for real-world robotics. We rethought and reshaped everything! 🧵👇
English
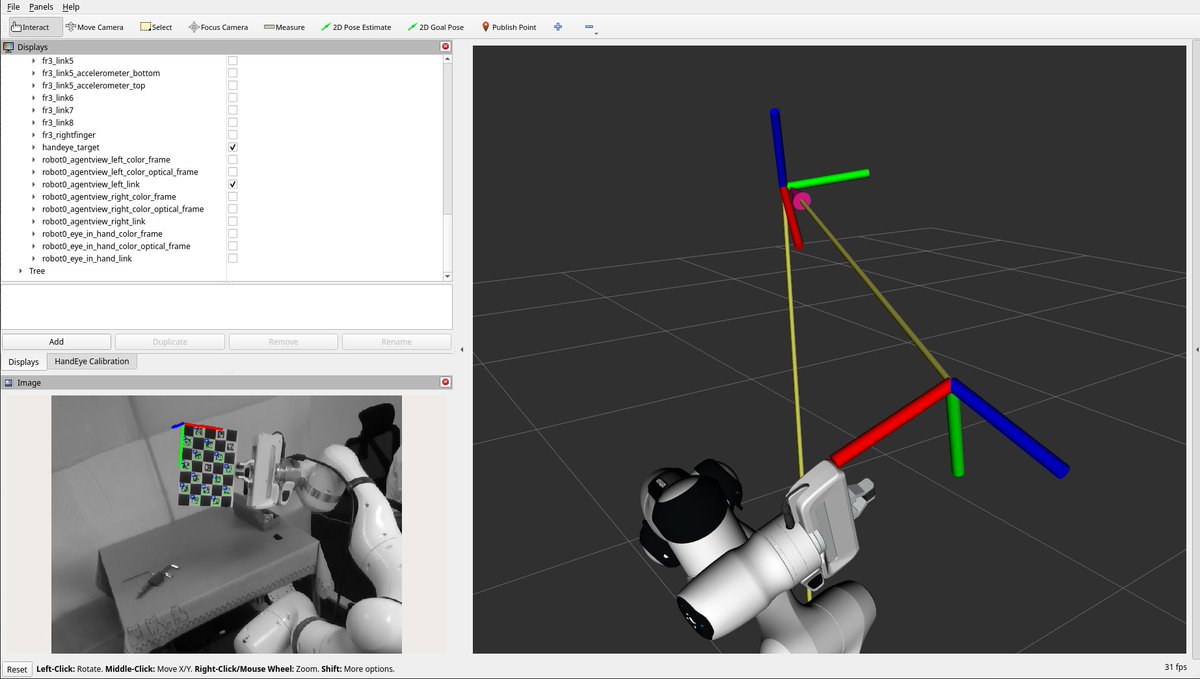
Hand-eye calibration on a Franka with RealSense cameras can be surprisingly brittle.
After stitching together franka_ros2 + MoveIt Calibration a few times, I got tired of the setup overhead and built a unified repo for it.
No Docker. No system ROS 2 install. One repo.
Clone it, run pixi install, and start calibrating eye-in-hand or eye-to-hand.
Thanks to @prefix_dev 's pixi-build preview feature, franka_ros2 + moveit_calibration can be built together in one shot. 🙌
Hope it saves someone a few hours: github.com/XingxinHE/fran…

English
@eg117117 What are the state space and action space you use in GR00T?
English

GWのプチ自由研究でVLAのベンチマークをやってみましたけど、おおむねpi seriesが優秀で(タスク成功率80~%)smolVLAもファインチューニングすればそこそこは動きますね。GR00Tはなんかミスってるのか全然うまくいかない
日本語
Calibration ongoing... I think the procedure should not be this tedious. Cooking sth for the community...
English

🎉 Life update: I joined @GoogleDeepMind as a Student Researcher.
Last week I started my internship at the Gemini Robotics team in London, building the new generation of physical AI with the group of talents I had been only hearing from papers 🧠
Excited about this new journey!

English
I used to have zellij for setting up a few tabs and panes in order to separate workspaces… Zed addresses my pain points and I love it!
Zed@zeddotdev
We've shipped more than a thousand versions of Zed, but all of them began with zero. Today, that changes. zed.dev/blog/zed-1-0
English
@LeRobotHF @Thom_Wolf @ClementDelangue Just walked out of the lab after a day of wrestling with data collected in a Franka robot, data conversion, compatibility headaches, and dataset cleanup on and on and on.... Is this a lifesaver or what😍?
English

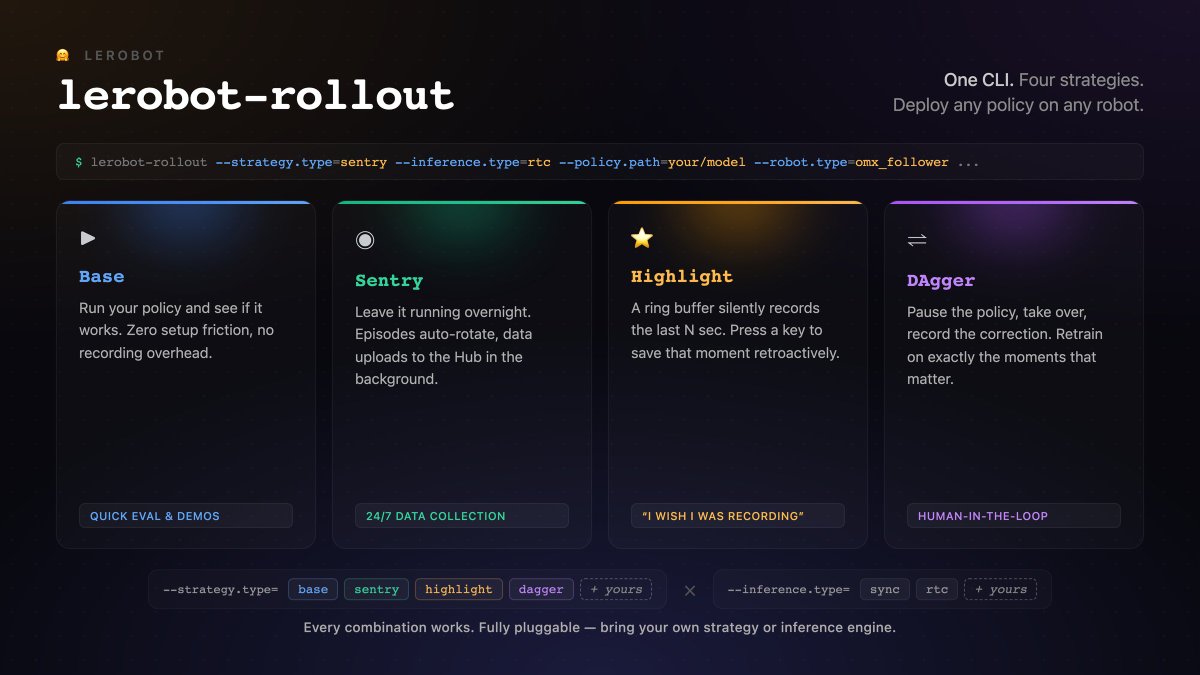
🤖🚀 𝗜𝗻𝘁𝗿𝗼𝗱𝘂𝗰𝗶𝗻𝗴 '𝗹𝗲𝗿𝗼𝗯𝗼𝘁-𝗿𝗼𝗹𝗹𝗼𝘂𝘁' — 𝗼𝗻𝗲 𝗖𝗟𝗜 𝘁𝗼 𝗱𝗲𝗽𝗹𝗼𝘆 𝗮𝗻𝘆 𝘁𝗿𝗮𝗶𝗻𝗲𝗱 𝗽𝗼𝗹𝗶𝗰𝘆 𝗼𝗻 𝗮𝗻𝘆 𝗿𝗲𝗮𝗹 𝗿𝗼𝗯𝗼𝘁.
Until today, running a trained policy on a real robot meant repurposing 'lerobot-record' — the same script you used to collect data. Need a different inference engine? That was yet another script. 'lerobot-rollout' replaces all of that with one command: pick a rollout strategy, pick an inference engine, and go.
🔵 Base — Run your policy. See if it works. No recording, no setup friction.
🟢 Sentry — Leave your robot running overnight. Episodes auto-rotate, data streams to the 🤗 Hub in the background. Come back to a ready-made dataset.
🟠 Highlight — A ring buffer silently records the last N seconds. See something interesting? Press a key and that moment is saved retroactively. No more "I wish I was recording."
🟣 DAgger — When the policy fails, pause it, take over with the teleoperator, record the correction, and resume. Every intervention is tagged so you retrain on exactly the moments that matter.
All four strategies work with both synchronous and Real-Time Chunking (RTC) inference, and you can even plug your own! Every combination of strategy × inference engine just works.
English
@XiaomiMiMo No response after the submit button... Is it overloaded🥶
English

We believe open source is more than releasing weights — it’s about building ecosystems.
Today, we’re introducing MiMo Orbit.
A program to support builders, frameworks, and the next wave of AI applications.
MiMo Orbit includes:
1️⃣ 100T Token Grant for Builders
We’re making 100 trillion (100T) tokens available to AI builders worldwide.
• Free access, while supplies last
• Application-based
• Up to a 1-month Max Plan (1.6B credits)
📅 Apr 27, 2026, 9:00 AM – May 27, 2026, 9:00 AM (PDT)
Apply here: 100t.xiaomimimo.com
2️⃣ Agent Ecosystem Program
We support Agent frameworks globally with free integration access and zero-friction onboarding for your users.
If you’re building an Agent framework, let’s collaborate:
📩 business-mimo@xiaomi.com

English

@chelseabfinn @Anikait_Singh_ The result sheds some light on how interdisciplinary the field of robotics currently is..🤔
English

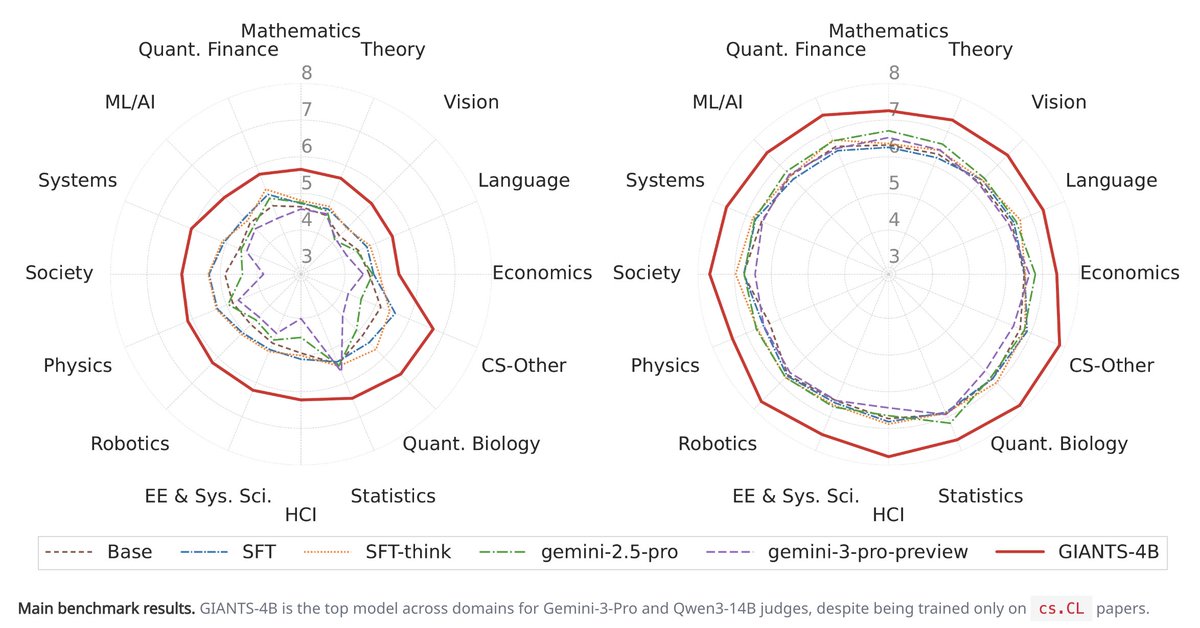
Can LLMs generate new insights that build on prior research?
GiantsBench is a new scientific discovery benchmark, that tests whether models can synthesize new insights given two parent papers.
Paper + data + code: giants-insights.github.io
Joy He-Yueya@JoyHeYueya
Scientists often make breakthroughs by synthesizing ideas across papers. In our new paper, we ask whether a language model can anticipate this process: given two parent papers, can it generate the core insight of a future paper built on them? 🧵⬇️
English


it's very interesting/surprising it emerged without training for it, wouldn't have guessed that
if you are willing to train for it, it's probably not that hard to achieve the described future. We did something pretty similar at small academic scale here: sites.google.com/view/mv-mwm
You can move around a hand-held camera while the robot is executing the task, using the moving hand-held as its vision input
English

The first time we rolled a robot into a new warehouse, it didn’t perform as well as we expected.
It took us an entire day of debugging, before we realized it was something simple… the cameras were wired completely wrong. 🤦
Left camera to right gripper 🔀 right camera to left gripper.
But what was interesting was, the model still kind of worked.
In post-training data, left side = bin, right side = conveyor. But even when swapped, the model would still do the task—just slightly worse. Enough to fool us into thinking it was something else for hours… until the moment we switched the cameras back. Then it worked great.
This wasn’t the first time we’ve seen emergent ambidexterity.
During a packing demo last year, we spotted the robot using the “wrong” hand to shake a USB brick out of a tight baggie. Totally outside the post-training data (we watched all 17 hrs of it to double check). 100% left hand, but for some reason at inference time, it felt the need to use the right hand. Nothing in the model architecture could obviously explain this kind of invariance.
If these models are headed where I think they are, imagine one day having a generalist “substrate of intelligence” where you can plug in any number of sensors and actuators, and the whole thing just springs to life.
It wouldn’t matter how you wired it up. It would just work.
That would be pretty cool.
Generalist@GeneralistAI
GEN-1 puts plushies into polybags, in a warehouse outside the lab in New Hampshire.
English
Day 1 reading this post, enjoy a lot!
LeRobot@LeRobotHF
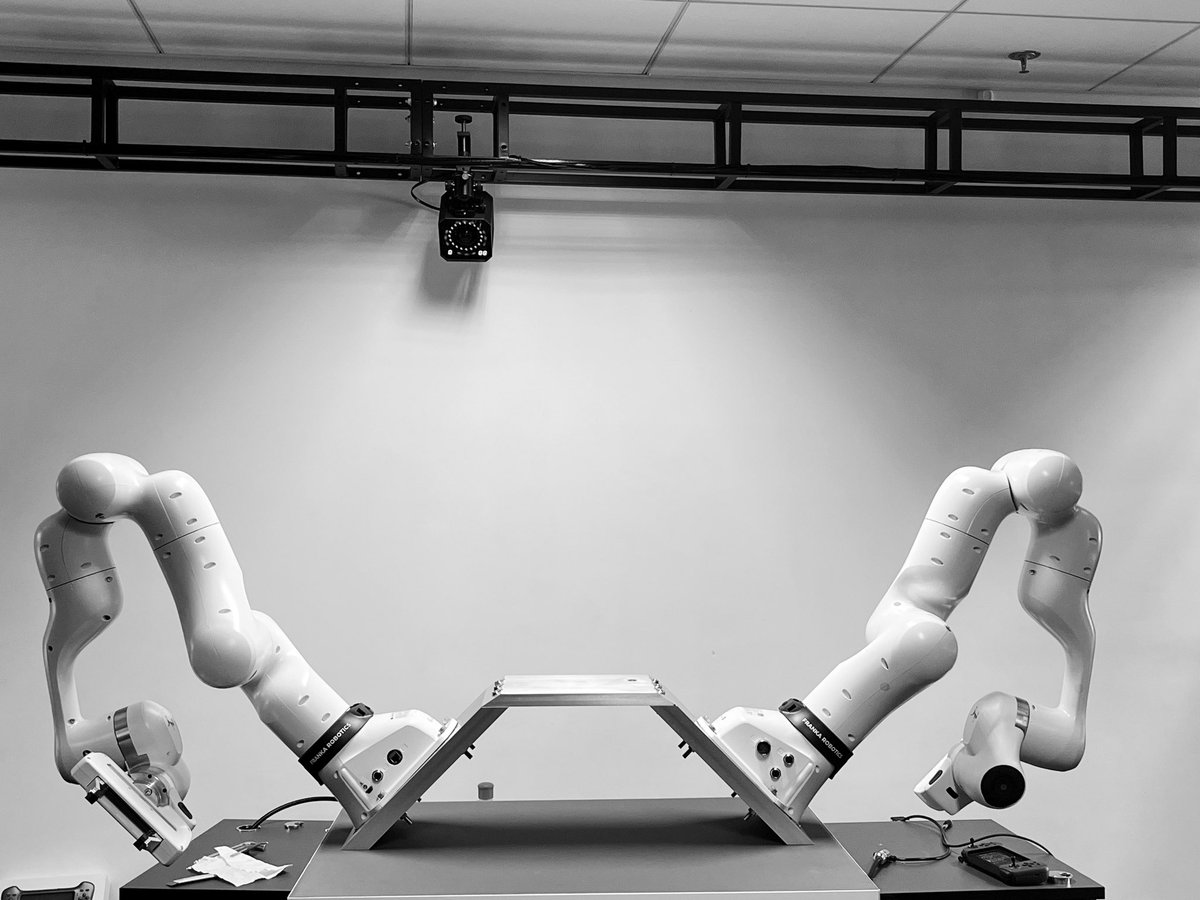
Releasing the Unfolding Robotics blog! Time to unfold robotics: we trained a robot to fold clothes using 8 bimanual setups, 100+ hours of demonstrations, and 5k+ GPU hours. Flashy robot demos are everywhere. But you rarely see the real story: the data, the failures, the engineering. We’re sharing everything: code, data, and details in the blog → huggingface.co/spaces/lerobot…
English
Releasing the Unfolding Robotics blog!
Time to unfold robotics: we trained a robot to fold clothes using 8 bimanual setups, 100+ hours of demonstrations, and 5k+ GPU hours.
Flashy robot demos are everywhere. But you rarely see the real story: the data, the failures, the engineering.
We’re sharing everything: code, data, and details in the blog → huggingface.co/spaces/lerobot…
English