Sabitlenmiş Tweet
yoneken
46K posts

yoneken retweetledi

何度も言うが、「リアルタイム制御」の本質は「応答の速さ」ではなく「応答が揃う」こと。
これ、制御屋でも理解していない人が多い。特にPLCのフリースキャンで「速く回ること」ばかりに注目している人ほど、制御の本質を外してる気がする。
装置制御で本当に重要なのは平均応答時間ではなく、サンプリング周期のジッタと、入力→演算→出力の遅延ばらつき。これらが揺れると同じロジックでも出力タイミングの位相が毎回変わる。
例えば、
「1回上手く動いても再現性が出ない」
「負荷が増えたら時間関係が崩れ、制御が破綻する」
などは、時間の設計ができていないから起こる。
特に多軸同期や位置同期出力などの制御で効くのは、速さそのものではなく、「低ジッタで揃っている」こと。
制御が破綻するのを性能不足のせいにする人が多いが、これは性能不足ではなく、時間設計不足。
これも何度も言ってるが、設備の制御屋はモータを回したりI/Oを叩いたり機器と通信するのが仕事ではなく、時間を設計するのが制御屋の仕事。
日本語
yoneken retweetledi


yoneken retweetledi
🎉なんと!早くも第4版です!
まだ手に取っていない人、最近の波に追いつくためにも、ぜひ読んでみてください!
講談社サイエンティフィク🖋️📔@kspub_kodansha
【🤖重版決定🧠】 河原塚健人/松嶋達也・著 『基盤モデルとロボットの融合 マルチモーダルAIでロボットはどう変わるのか』 おかげさまで重版決定です🚀🚀🚀🚀 フィジカルAIにこの一冊! 河原塚先生 @KKawaharazuka は、オープンソース(ハードウェア)のロボットをつくったり、ほぼ人間をつくったりしています! 松嶋先生 @__tmats__ は、仲間となるロボットを地球上にはびこらせる最前線でゴリゴリやられてます!Tokyo Bay AreaはフィジカルAIのホットスポットです🔥
日本語
yoneken retweetledi

yoneken retweetledi
yoneken retweetledi

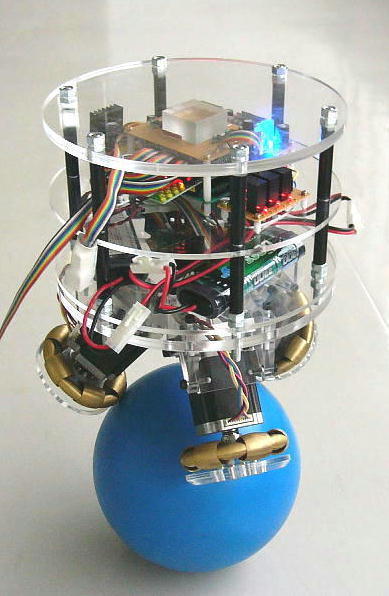
MCPサーバーに「歩行制御」と「双腕制御」を追加
「右手をX方向に0.05m・Z方向に0.05m動かして」とClaude Codeに伝えるとAIが右腕を簡易版IKで動く
MuJoCo上のカメラ画像からリアルタイム伝送した中央ワイプの画像は、VLA(Vision-Language-Action)への映像入力にも使える
#Meridian計画 #Claude

holypong@automo_emo
小型ヒューマノイドの下半身の「歩行制御AI」が動作したので、次は上半身の「双腕制御AIとVLA」へ ロボット実機をリーダー、MuJoCoシミュレータをフォロワーとしてデジタルツイン化 カメラに映る赤球への到達動作を学習させて、自律的に赤球を追わせる ブンドド的なフィジカルAI #Meridian計画
日本語
yoneken retweetledi

@noratelier @ysuga @crow_coffee @FrostyDesign_JP 迅速な入力ありがとうございました〜
1ヶ月先になっちゃいますけど、5/27(水)で良さそうでしょうか?
場所は高田馬場か新宿あたりが集まりやすいのかなぁ
Ichikawa-shi, Chiba 🇯🇵 日本語
Funabashi-shi, Chiba 🇯🇵 日本語
@ysuga @FrostyDesign_JP @noratelier @crow_coffee 最近いかがですかね?週末は子どもの習い事で身動きとれないんですが、タイミング狙えば平日の夜に近況報告会とかできそうですか??
Chuo-ku, Tokyo 🇯🇵 日本語
yoneken retweetledi


yoneken retweetledi

個人的な興味でヒューマノイドの足裏見てたんやけどただの棒やったり人の靴履かせてたり、靴底っぽいロボット専用足っぽいのがあったりしておもろい




日本語
yoneken retweetledi
だから、いま聞きたいのは、「なぜ、ヒューマノイドロボットにそこまで予算をツッコもうと思ったのか」といういまの中国の流れの起点が、いかなるものだったかが知りたい。QDD系、しばらくは4脚だったし。ブームになったら乗る人は多いのは分かるとして。
日本語
これなんすよ・・・
ロボットを知らずプログラムがちょっとできるくらいでロボット業界に入ったとき、自分がHWごとにオブジェクト作って外部には抽象化インタフェースだけ出して内部変数を隠蔽して・・ってやってたら、「それじゃ後で辛くなるよ」って書き直させられた。今では理由がすごくわかる
Yuki Suga/編み物ラグビー好きフリーランスロボット屋プログラマー@ysuga
長年、ロボットシステム屋をやってるけど、自分が働くロボットシステム作るときに大事にしてる設計指針のひとつとして 「任意の瞬間の機械の全状態が観測可能とせよ」 というのがある。 例えばアームでの搬送をするとき、ソフトウェアを多少囓ってる人は特に「掴んだかどうかの履歴を使えば、いまその瞬間にロボットがモノを持ってるかどうかが分かる」と考えがちで、それは正しいのだが、信頼度が高い機械システムを作るときは、センサ等で観測できないか検討するべき。 変数を追加することはかなりのコストをかけることになる。本来、ピュアにソフトウェア開発でも状態を増やすのは簡単には容認できない。 機械に話を戻すが、もし機械の全状態が観測可能なら、プログラムはハードウエアにアクセスして、観測した状態に従って行動するのみになり、テストが非常に容易になる。例えば、任意の姿勢を取らせてから観測・行動を1回だけ行う、みたいなテストが可能になる。 状態履歴を残すための変数はそれを不可能にする時点で、実物を扱うロボットの世界では「巨大な」コストを支払う。 コードは一行だが、そのリスクに想いを巡らせられる人は少ない。
Funabashi-shi, Chiba 🇯🇵 日本語
yoneken retweetledi

長年、ロボットシステム屋をやってるけど、自分が働くロボットシステム作るときに大事にしてる設計指針のひとつとして
「任意の瞬間の機械の全状態が観測可能とせよ」
というのがある。
例えばアームでの搬送をするとき、ソフトウェアを多少囓ってる人は特に「掴んだかどうかの履歴を使えば、いまその瞬間にロボットがモノを持ってるかどうかが分かる」と考えがちで、それは正しいのだが、信頼度が高い機械システムを作るときは、センサ等で観測できないか検討するべき。
変数を追加することはかなりのコストをかけることになる。本来、ピュアにソフトウェア開発でも状態を増やすのは簡単には容認できない。
機械に話を戻すが、もし機械の全状態が観測可能なら、プログラムはハードウエアにアクセスして、観測した状態に従って行動するのみになり、テストが非常に容易になる。例えば、任意の姿勢を取らせてから観測・行動を1回だけ行う、みたいなテストが可能になる。
状態履歴を残すための変数はそれを不可能にする時点で、実物を扱うロボットの世界では「巨大な」コストを支払う。
コードは一行だが、そのリスクに想いを巡らせられる人は少ない。
日本語
yoneken retweetledi
yoneken retweetledi

船体保護亜鉛といいます。タンカー船の船体にたくさん取り付けられている亜鉛板。海水の上を鉄製の船が走ると船体の鉄が電気分解されます。これを避けるために鉄よりイオン化傾向の高い亜鉛板から溶けてもらうのです。亜鉛板は1〜2年でアイスのように溶けてしまうので交換します。犠牲陽極とも言います


日本語
yoneken retweetledi

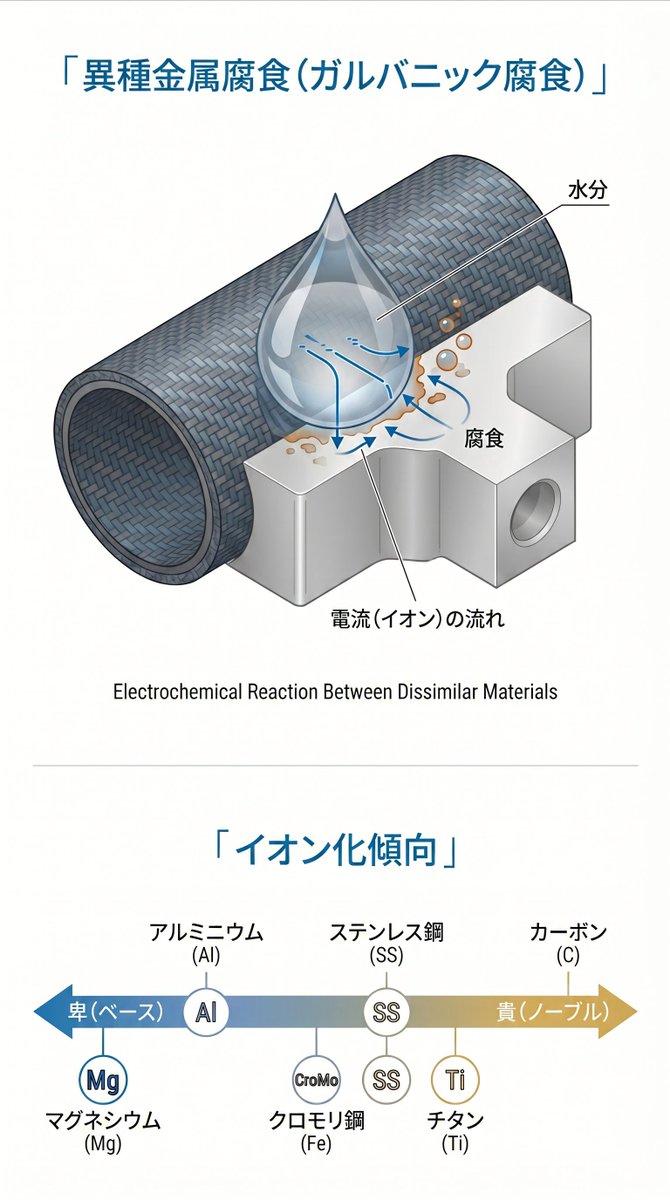
カーボン+アルミやチタン+アルミはガルバニック腐食から見れば最悪の組み合わせ。航空機などは接合部分のインサートなどは徹底的な絶縁処置を行なっている。だから高い。チタンフレームもこのリスクは大きい。「チタンボルト、軽量化、いえ〜い」なんてやってると大きなダメージになることもあります。電位差を理解し、組みつけには絶縁グリスを使うなど注意が必要です。
日本語
yoneken retweetledi
