Sabitlenmiş Tweet

MolmoSpaces provides singular scale and diversity. We built a benchmark that puts that scale to use.
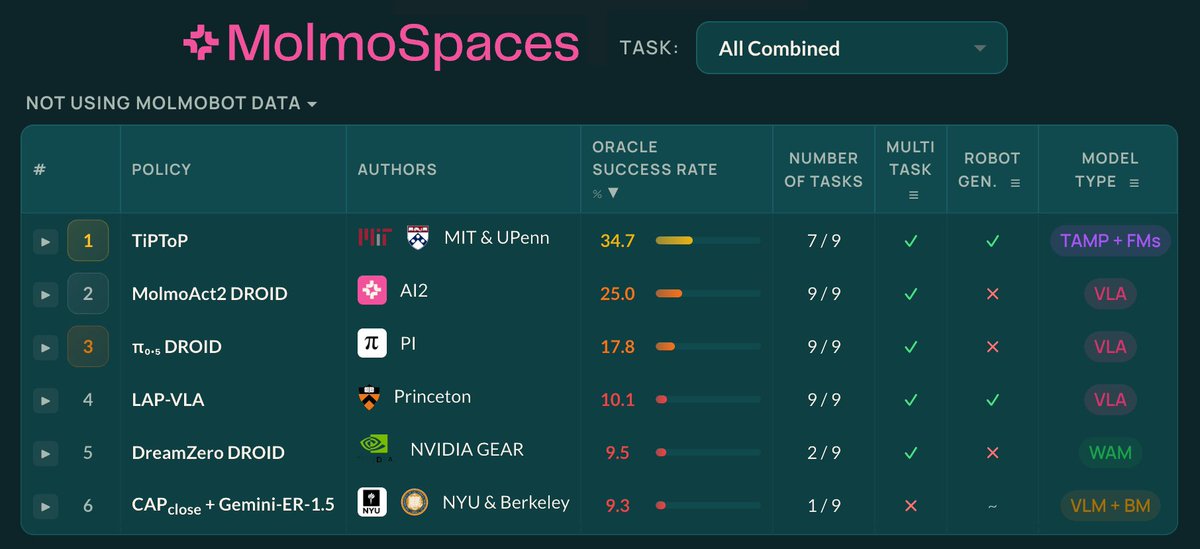
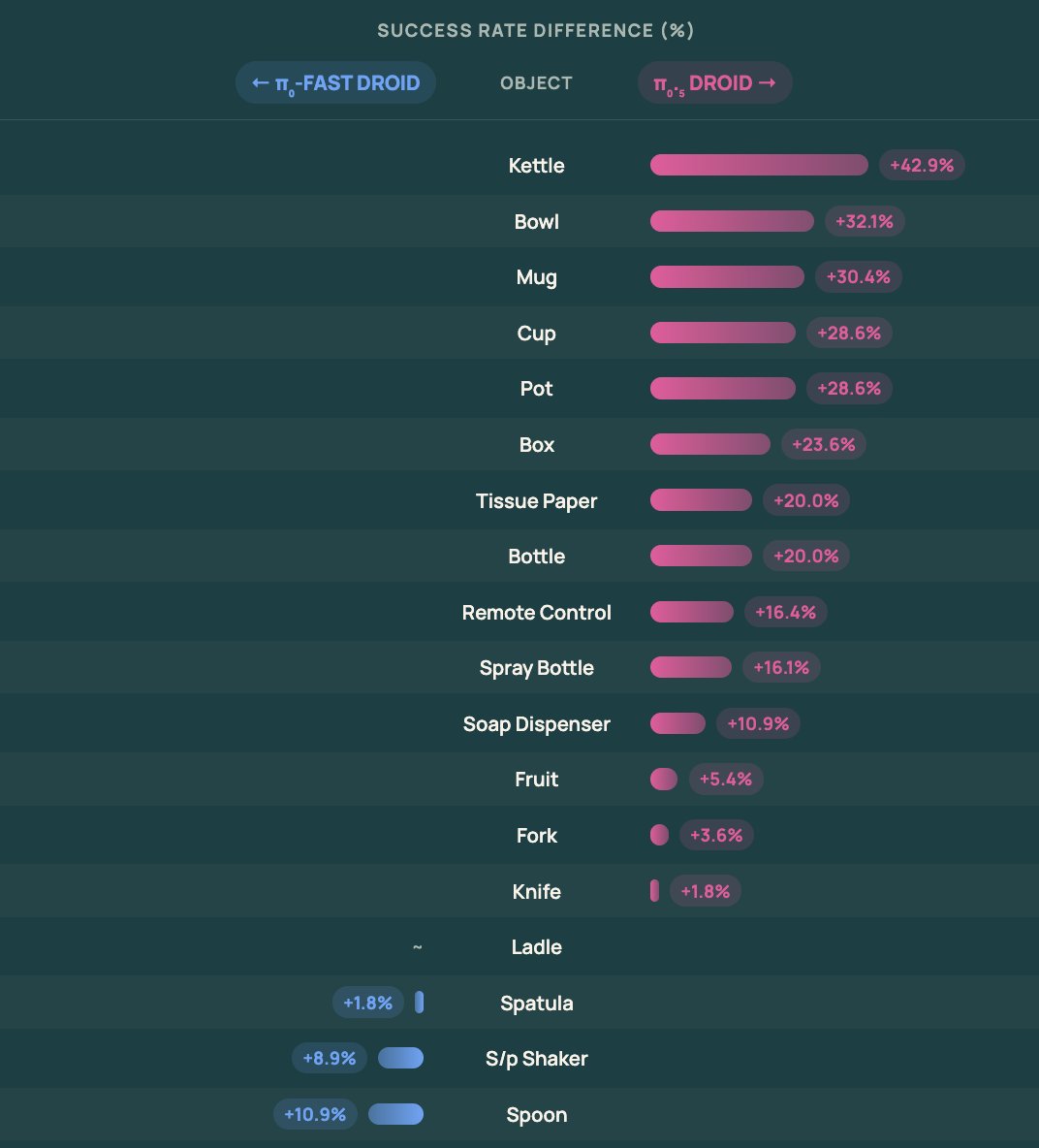
MolmoSpaces-Bench evaluates zero-shot policies across thousands of environments previously unseen to them under systematic variation, providing insights that go beyond a success rate %
More Below:
Ai2@allen_ai
Introducing MolmoSpaces, a large-scale, fully open platform + benchmark for embodied AI research. 🤖 230k+ indoor scenes, 130k+ object models, & 42M annotated robotic grasps—all in one ecosystem.
English