Roger Girgis retweetledi

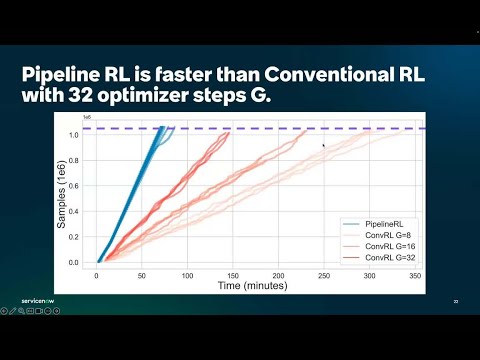
In-flight weight updates have gone from a “weird trick” to a must to train LLMs with RL in the last few weeks. If you want to understand the on-policy and throughput benefits here’s the CoLM talk @DBahdanau and I gave: youtu.be/Z1uEuRKACRs
YouTube
English