
Brian Smith
1.5K posts
Brian Smith
@sirwart
Building @tetradynamics
San Francisco, CA Katılım Mayıs 2009
359 Takip Edilen1.4K Takipçiler

Gonna list our Noe home at 2x what it’s worth lmk if you hate money
English
@randallmbriggs @mattfreed If you build an American Arm we will put an American Hand on it
English


The rumors
Theyre true
We’re building The American Hand Company
English
@zeeg I use TUIs because developers are incapable of developing GUIs that don't feel slow as molasses or prompt me to quit and update every time I open it
English
TUIs are not good sorry yall
a CLI is a utility, and situational. this should not be confused with stuffing a full interactive GUI into a low capability platform.
"lets ignore all the great UI technology of the last 20 years and build some caveman shit"
English
I really love the elegance of this PI paper on async inference: arxiv.org/pdf/2512.05964…. I run my encoder sync and decoder async, but the method is so simple it just works. Nice work @kvablack, @allenzren, and @michael_equi!
English
@zeeg If you're willing to run open models you can try Firepass from Fireworks for a fixed cost subscription for personal use
English
the worst part about using LLMs/agents in a side project is tokens are $$$$ 😬
i die a little every time i run my tests (evals)
English
@carlosdponx My guess is that the overall scene is scripted, but to even run that script on a real robot is quite an accomplishment
English

really nice, smooth motion. some of the things it does make me curious of what level of "autonomous" we're talking about here.
like, what is the command/commands it was given? is it "clean this room", or a task list?
Figure@Figure_robot
Today we're showing Helix 02 that can tidy a living room fully autonomously Figure is designed so when you leave the house, your home resets exactly how you like it
English
@chris_j_paxton If you’re truly AI pilled how could English or any human language be the language of AIs? There are infinite languages out there that could fill every intellectual niche
English

If youre truly ai pilled how could you square that with humanoid robots? I feel like ai-assisted cad + manufacturing + cross embodiment learning + high fidelity simulation would allow for an infinite profusion of diverse robots for different ecological niches
English
@googlecloud I'm trying to enable the Compute API but it continually fails. I can't open a support ticket without paying. That requires me to be a "Support Account Admin" of my org. Trying to add that perm to my account also fails. Could you please help?
English

Sheet metal X, who out there is doing prototype and production sheet metal forming? Not rolling, not laser, but complex forming.
English
@siyuanhuang95 This is so cool. I especially like how characterizing the motor performance better in sim lowers the sim2real gap. Reality is complicated!
English

You might have seen the WuBOT performing at the 2026 Spring Festival Gala; however, most high-dynamic extreme motions you see are executed by overfitted tracking policies. Until now, training a unified policy capable of performing various extreme motions with a high success rate remained an unsolved challenge.
We spent an entire year digging into the barrier between general tracking and extreme physical behaviors. After burning through dozens of G1 robots, we finally identified the bottleneck of learning and physical executability.
With these discoveries, we developed OmniXtreme: the first general policy that can execute diverse extreme motions, including consecutive flips, extreme balancing, and even breakdancing with rapid contact switches!
This capability is achieved by pre-training a flow-based generative control policy and then post-training with actuation-aware residual RL for complex physical dynamics—a step we found critical for successful real-world transfer.
This work is a joint collaboration with @UnitreeRobotics. Together, we are pushing the physical limits of humanoid robots. It is incredibly exciting to see a general "robot gymnast" and "robot breakdancer" come to life! It was also our first time publishing a paper with XingXing, which was an enlightening experience.
The model checkpoints are now released—we welcome you to play with them! 📦
📄 Paper: arxiv.org/abs/2602.23843
🌐 Project: extreme-humanoid.github.io
💻 Code: github.com/Perkins729/Omn…
English
@ChongZitaZhang I'm a big believer in backdrivability, but a 200:1 gear reduction can be backdriveable if done right. Things don't scale linearly, so in the same way an ant can survive falling off a building fingers can get away with a lot that would be terrible for a leg
English

another more comprehensive perspective x.com/Vikashplus/sta…
Vikash Kumar@Vikashplus
❌ NOT TRUE @ChongZitaZhang A finger ≠ a leg In legged locomotion, low gear ratios help with impact tolerance, store kinetic energy, and back-drivability under heavy load. Unlike legs, hand constraints & requirements are different - high torque density - high positional controllability - brutal space constraints The real trade offs for hands are: - Low gear ratio → back drivability, responsiveness, - High gear ratio → torque density, stability, compactness 🟠So is high ratio bad? **Its depends** -- high gear ratios improve static precision & torque density, but reduce dynamic responsiveness & back drivability Infact, biological hands are not low-impedance torque sources either. Like duality of photons, human hands sometime act as precise, while other times acts as force manipulators. Perhaps we need a "Heisenberg Uncertainty Principle" but for Hands.
English
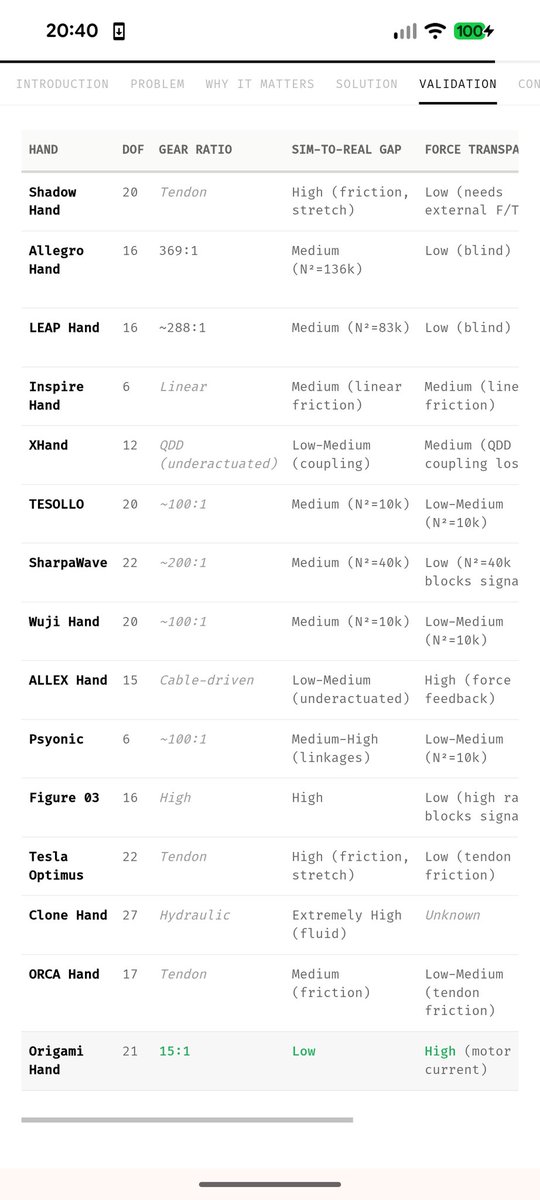
Before reading I didn't know the landscape of dex hand is so bad.
In modern legged locomotion, a gear ratio of 100 would already means [not usable] -- forceful actuation is not repeatable.
I can't believe in manipulation where precision is more important, they do this.
Quanting Xie@DanielXieee
Why does manipulation lag so far behind locomotion? New post on one piece we don't talk about enough: The gearbox. The Gap You've probably seen those dancing humanoid robots from Chinese New Year. Locomotion isn't entirely solved; but clearly it's on a trajectory. But we haven't seen anything close for manipulation. 𝗪𝗵𝘆? When sim-to-real transfer fails, the instinct is to blame the algorithm. Train bigger networks. Crank up domain randomization. Those approaches have made real progress; we don't deny that. But we started wondering: are we treating the symptom or the disease? The Hardware Bottleneck: Fingers are too small for powerful motors. So most hands use massive gearboxes (200:1, 288:1) to get enough torque. But those gearboxes break everything manipulation needs: • Stiction and backlash are complex to simulate. Policies trained on smooth physics hallucinate when they hit that reality. • Reflected inertia scales as N². At large gear ratio, the finger hits with sledgehammer momentum. • Friction blocks force information. The hand becomes blind. And they're the first thing to break. What we are trying to build at Origami, we cut the gear ratio from 288:1 to 15:1 using axial flux motors and thermal optimization. The transmission becomes more transparent: backdrivable, low friction, forces propagate to motor current. Early signs are encouraging. Still running quantitative benchmarks. Why Interactive? I love how Science Center uses interactive devices to explain complex ideas. I want to borrow this concept and help people understand the hard problems in robotics better visually. The post has demos where you can toggle friction, slide gear ratios, watch the sim-to-real gap widen in real-time. What's inside: • Interactive demos (friction curves, N² scaling, contact patterns) • Comparison table: 14 robot hands by sim-to-real gap and force transparency • The math behind why low-ratio matters Read it here: origami-robotics.com/blog/dexterity… We're not claiming we've solved dexterity. The deadlock has many pieces. But we think this one's foundational. Curious what you think.
English
@ehfeng We probably need to normalize monetizing API access. I think the big barrier companies have is they want to sell ads, but agents won't click ads, so the equilibrium is to open up API access again.
English

Very impressive technology, but I'm sad that all the public APIs of the early 2010s got turned off and instead we'll have giant models clicking slop generated UIs as a means of automating things
Standard Intelligence@si_pbc
Computer use models shouldn't learn from screenshots. We built a new foundation model that learns from video like humans do. FDM-1 can construct a gear in Blender, find software bugs, and even drive a real car through San Francisco using arrow keys.
English
This interview is wild. "We're going to automate away 100s of millions of jobs in the next couple of years, but don't worry, I'll make trillions doing it." I'm skeptical of full AGI, but If you believe it there's no way it will be monopolized by a handful of Bay Area companies
Dwarkesh Patel@dwarkesh_sp
The @DarioAmodei interview. 0:00:00 - What exactly are we scaling? 0:12:36 - Is diffusion cope? 0:29:42 - Is continual learning necessary? 0:46:20 - If AGI is imminent, why not buy more compute? 0:58:49 - How will AI labs actually make profit? 1:31:19 - Will regulations destroy the boons of AGI? 1:47:41 - Why can’t China and America both have a country of geniuses in a datacenter? Look up Dwarkesh Podcast on Youtube, Spotify, Apple Podcasts, etc.
English
This is a good encapsulation of my feelings on LLMs: coding agents lets you propagate midwit ideas faster while ChatGPT gives you an enormous force multiplier on your own thought
Ben Visness@its_bvisness
We apparently live in the clown universe, where a simple TUI is driven by React and takes 11ms to lay out a few boxes and monospaced text. And where a TUI "triggers garbage collection too often" in its "rendering pipeline". And where it flickers if it misses its "frame budget".
English
@jorilallo @jimbelosic @OSHCutInc I’m definitely that way about JLCPCB, if a component isn’t in stock at LCSC I pretend it doesn’t exist
English

@sirwart @jimbelosic @OSHCutInc Good point, I mainly done SCS and PCBWay so tend to forget the others
English
@jimbelosic I want to like SCS but almost every time I'm ready to order parts I ran into some limitation on services (parts being too large or too small). Would it be possible to get powder coating for 2" part with holes? Don't want to China this 😕
English


@BreakingTaps Very cool! I love how quickly microcontrollers boot but had toyed with running bare metal on a pi to support more peripherals. Still trying to avoid it but curious if it's feasible
English

@sirwart In QEMU it's about 1.5 seconds. Unsure on real hardware, that's tomorrow's adventure!
English
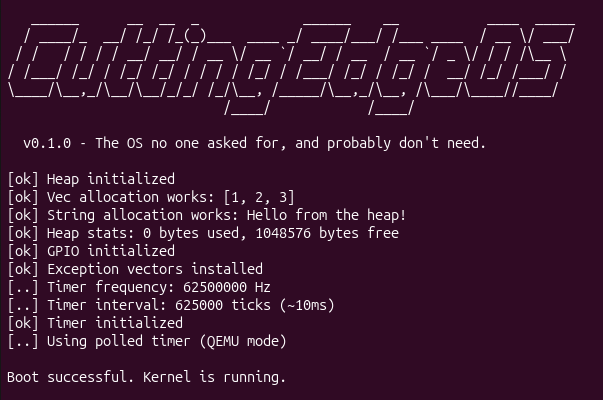
Forgive me lord for I have sinned 🙏
Wrote a custom operating system for RPi 4, written in Rust and boots into a minimal lisp REPL. Pretty neato!
Only one catch...
English