پن کیا گیا ٹویٹ

This might be the most advanced thing I have ever built. So many parts all coming together
Auki@Auki
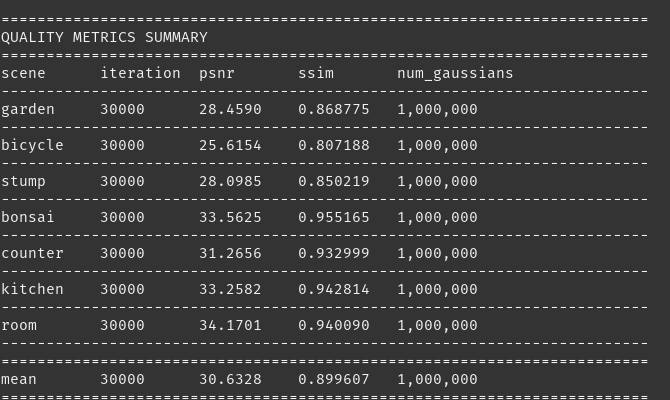
Very large indoor gaussian, collaboratively captured on consumer grade phones without LiDAR.
English
Robinerd
1.5K posts

@RobinerdGames
Software engineer, musician, chiptune composer. Love game jams. Director of Spatial Computing at @Auki #augmentedreality #spatialcomputing #AI
Very large indoor gaussian, collaboratively captured on consumer grade phones without LiDAR.










I don't think the average person realizes how often humanoid robots break.

Starting now: @Intercognitive's inaugural X space on making the physical world accessible to AI and robots — come listen in! 👇 x.com/i/spaces/1aJbd…


Robots doing real work
Starting to get pretty good splats now, from custom iOS captures! @lichtfeldstudio



