Roni نور More retweetledi
Roni نور More
17.9K posts


Roni نور More
@RoniMore1
גרה בברלין, בעלת כלבלבים [email protected]
Katılım Temmuz 2012
734 Takip Edilen408 Takipçiler

Roni نور More retweetledi

I just realized that Israelis have been reviewing bomb shelters and it’s amazing 😂



English
Roni نور More retweetledi

We believe we’re the first robotics company to demonstrate a robot peeling an apple with dual dexterous human-like hands. This breakthrough closes a key gap in robotics, achieving bimanual, contact-rich manipulation and moving far beyond the limits of simple grippers. 🧵↓
Today’s AI models (VLMs) are excellent at perception but struggle with action. Controlling high-degree-of-freedom hands for tasks like this is incredibly complex, and precise finger-level teleoperation is nearly impossible for humans. Our first step was a shared-autonomy system: rather than controlling every finger, the operator triggers pre-learned skills like a “rotate apple or tennis ball” primitive via a keyboard press or pedal. This makes scalable data collection and RL training possible.
How does the AI manage this? We created "MoDE-VLA" (Mixture of Dexterous Experts). It fuses vision, language, force, and touch data by using a team of specialist "experts," making control in high-dimensional spaces stable and effective. The combination of these two innovations allows for seamless, contact-rich manipulation. The human provides high-level guidance, and the robot executes the complex in-hand coordination required.
This work paves the way for robots that can safely handle delicate tasks in human environments. Want the full technical details?
📄 Read the full research paper: arxiv.org/abs/2603.08122
Visit us at NVIDIA GTC Booth #1838, Hall 3 to learn more!
#Robotics #AI #DexterousManipulation #VLA #NVIDIAGTC @nvdia @nvidiagtc
English
Roni نور More retweetledi

Today, Figure is showing another major milestone towards a robot in every home
Running Helix 02, cleaning a living room fully autonomously
English
Roni نور More retweetledi

Many real-world tasks require memory to be successful. Yet, most robots don’t have any form of memory. Today, we are going to change that. We developed a system called MEM that introduces memory into VLAs on multiple scales
Physical Intelligence@physical_int
We’ve developed a memory system for our models that provides both short-term visual memory and long-term semantic memory. Our approach allows us to train robots to perform long and complex tasks, like cleaning up a kitchen or preparing a grilled cheese sandwich from scratch 👇
English
Roni نور More retweetledi

Roni نور More retweetledi

praying to god is low key embarrassing. girl if He wanted to He would
English
Roni نور More retweetledi

A useful thing about MoltBook is that it provides a visceral sense of how weird a "take-off" scenario might look if one happened for real
MoltBook itself is more of an artifact of roleplaying, but it gives people a vision of the world where things get very strange, very fast.
English
Roni نور More retweetledi

Roni نور More retweetledi

🚨Renee Good’s autopsy confirms she was murdered by an ICE agent.
And, an FBI agent, along with SIX federal prosecutors, resigned rather than help cover it up.
The first shot hit her arm.
The second shot hit her right lung.
The third, and fatal shot, entered her left temple and exited the right side of her head.
By the second and third shots, the ICE agent was undeniably on the side of the car... clear of any “danger.”
And after firing the final shot into her head… the agent’s response was…
“fucking bitch.”
Jonathan Ross murdered Renee Good.
And the murder hasn’t even been removed from duty.

English
Roni نور More retweetledi

Roni نور More retweetledi

הצמר של הכבשים בדיר נצבע בדם חברותיהן, אחת עם תחבושת לצווארה שרדה לבינתיים את נסיון השחיטה. בביה״ח ביטא עומרי בן החצי שנה עדיין מאושפז אחרי שהובהל במצב קריטי ואושפז בטיפול נמרץ מחנק מגז פלפל. מצלמות האבטחה תיעדו גם את המתקפה הזו, זו הפעם השנייה תוך חודשיים שמתנחלים תוקפים בברוטאליות את בית המשפחה בשטח B בפאתי הכפר סמוע.

עברית

Roni نور More retweetledi

Okay let's talk about this. What happens:
- operator forgets to "clutch out" and tell the robot to stop tracking his hands
- the robot hands go up to its head
- the robot doesnt move its legs to stay balanced - which seems to imply its not doing whole body control like we would expect
- he turns off the robot while its in this unbalanced state, and its arms go to a neutral position close to where the video started-- but because the arms are out of position it makes a huge, fast movement and absolutely smashes that water bottle, sending water spraying everywhere
A lot of people are blaming the operator here but i think forgetting to press a button is, again, pretty human, and you could build a much more robust system here. No reason imo this robot should have fallen.
English
Roni نور More retweetledi

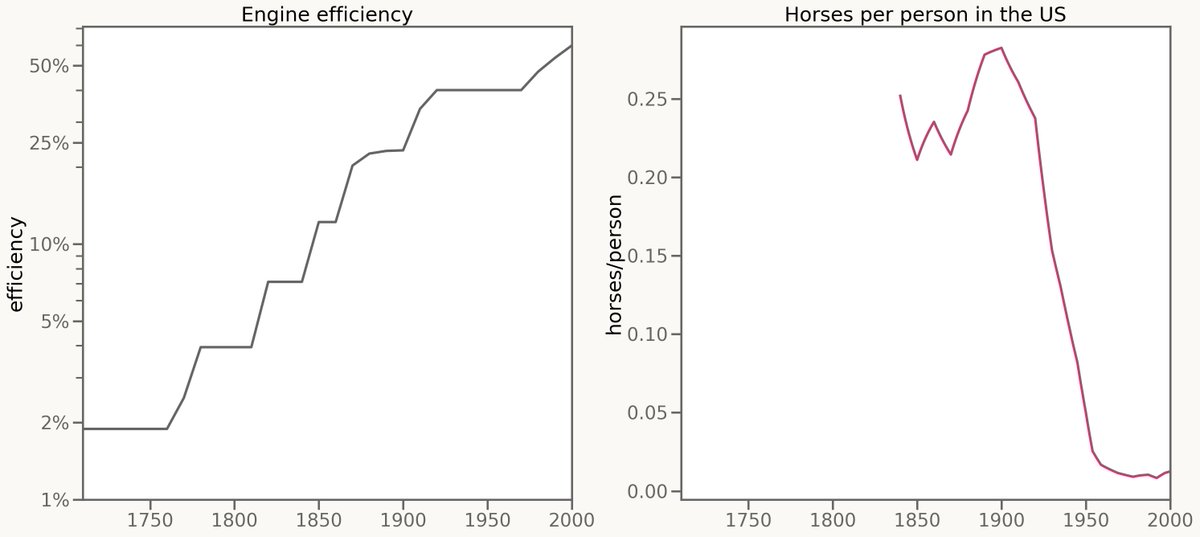
So after all these hours talking about AI, in these last five minutes I am going to talk about:
Horses.
Engines, steam engines, were invented in 1700.
And what followed was 200 years of steady improvement, with engines getting 20% better a decade.
For the first 120 years of that steady improvement, horses didn't notice at all.
Then, between 1930 and 1950, 90% of the horses in the US disappeared.
Progress in engines was steady. Equivalence to horses was sudden.
English
Roni نور More retweetledi

Today, we present a step-change in robotic AI @sundayrobotics.
Introducing ACT-1: A frontier robot foundation model trained on zero robot data.
- Ultra long-horizon tasks
- Zero-shot generalization
- Advanced dexterity
🧵->
English
Roni نور More retweetledi

Humanoids were long a thing of sci-fi, then they were a thing of research, but today, with the launch of NEO, humanoids become a product.
NEO is the first step on a journey towards a more abundant future and we’re excited for you to join us on this journey. Order your NEO today.
English
Roni نور More retweetledi

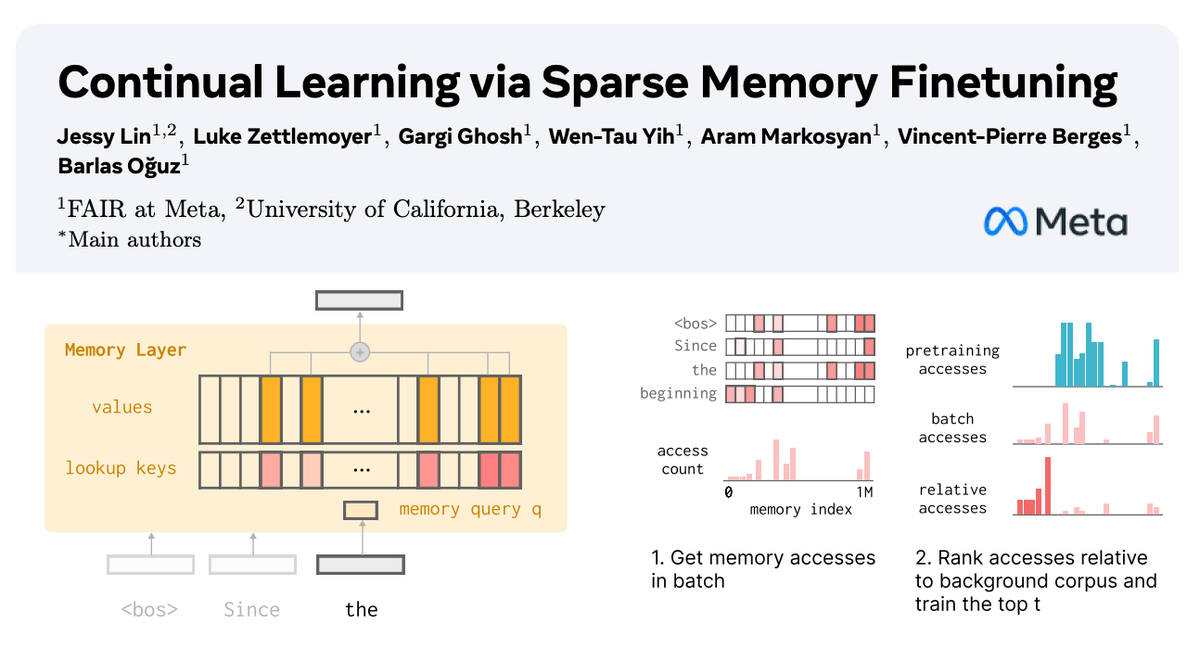
🧠 How can we equip LLMs with memory that allows them to continually learn new things?
In our new paper with @AIatMeta, we show how sparsely finetuning memory layers enables targeted updates for continual learning, w/ minimal interference with existing knowledge.
While full finetuning and LoRA see drastic drops in held-out task performance (📉-89% FT, -71% LoRA on fact learning tasks), memory layers learn the same amount with far less forgetting (-11%).
🧵:
English
Roni نور More retweetledi

Humanoids are on a fast track to surpass the agility and precise coordination of the world's best martial arts champions.
New Unitree G1 video:
English