Sabitlenmiş Tweet

After 8 months of building in stealth and testing our infrastructure on 10000+ hours of real-world data and hundreds of unique environments, we're bringing @fpv_labs into the open today.
FPV Labs started with the following bet - if human data proves to be the underlying factor that determines scaling laws in general-purpose robotics, it will trigger the largest economic transformation in human history, and the underlying infrastructure that captures that data will determine how fast we get there.
We will achieve this by building the full-stack infrastructure for capturing, processing, transferring, and evaluating human experience into spatial, temporal, and semantic knowledge for machines.
Despite all the research novelty behind ChatGPT, its success can be attributed to one foundational fact - the scaling law of transformers. We believe the same dynamics have made their way into robotics.
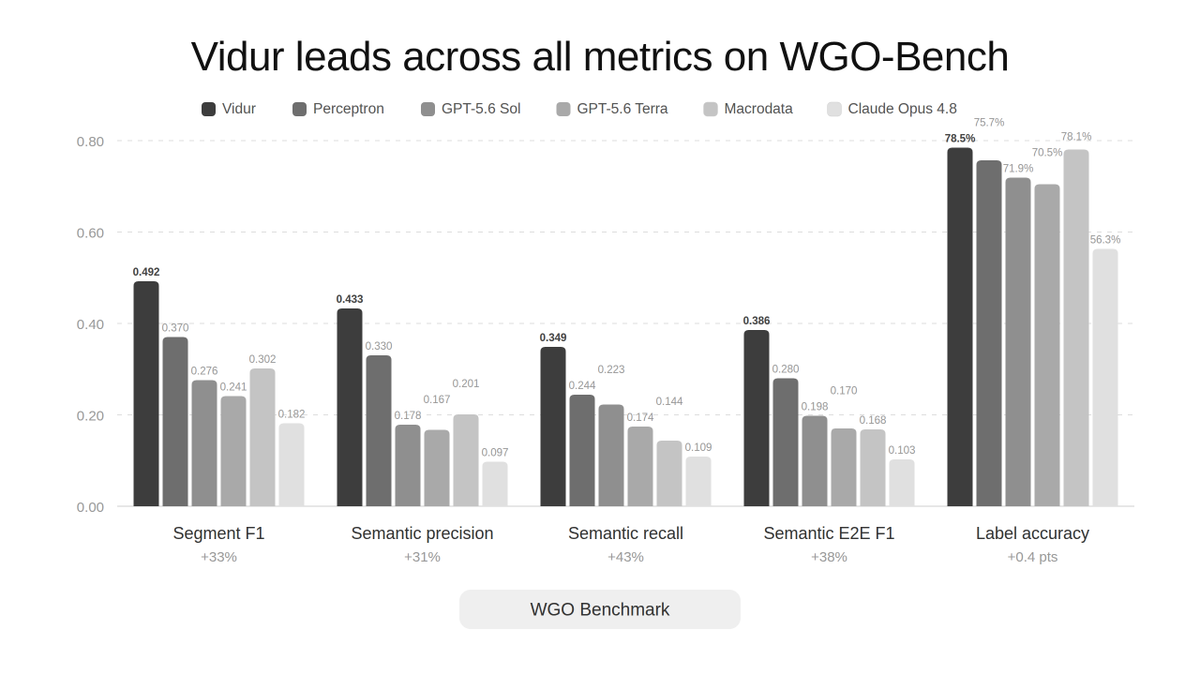
Recent studies showed task completion rates jumping from 30% to 70% when human demonstration data scaled from 1,000 to 20,000 hours, a log-linear trend that mirrors exactly what we saw in language and vision. Seeing these emergent signs of scaling law curves in robotics, we believe we are entering the era of general-purpose robotics policies, which makes the next few years the most exciting time in the history of this field.
But the library of physical interactions required to train general-purpose robot policies does not exist yet. Over the last 8 months, we've seen dozens of companies emerge in this space. We were really happy to see new companies pushing this space forward, but we also saw the same pattern repeat: every egocentric data company was making some tradeoffs between quality, scale, and diversity.
We have built FPV labs on the core principle that high-quality data is orders of magnitude more valuable than sheer volume. Case in point, self-driving cars collect thousands of hours of data per day, but only a small fraction of that data is actually useful for training better models. Several studies, like RT-2, have shown that as little as 1% of data improves as much as 25% on task success. The quality and diversity of data matter a lot more than scale, so there is clearly a power law curve in the downstream impact of data.
We've spent months obsessing over data quality by building our stack, discarding it, rebuilding it, and iterating until we found a formula that doesn't compromise downstream quality at scale.
We believe the downstream impact here is far more profound than most people realize. Workers globally are paid around $60 trillion per year in aggregate, and a lion's share of that compensation goes to physical labor - tasks that require navigating real spaces, manipulating real objects, and negotiating the infinite variability of the physical world.
Human-to-robot transfer will be one of the most important infrastructures that will shape our society in the near future, and if it works, the economic impact will dwarf every technology transition that came before it in an exponential manner and lead to the creation of goods and services we can’t imagine today.
Our mission is to lay the groundwork for us to transition into this future - the future of abundance. We are deeply grateful to our earliest believers, @paraschopra and @lossfunk, who played a critical role in shaping our thinking.
English