John retweetledi

guys, I think memory gets cracked in 2026
then infinite context
and memory + infinite context
= continual learning
you can feel it in the air
English
John
145 posts


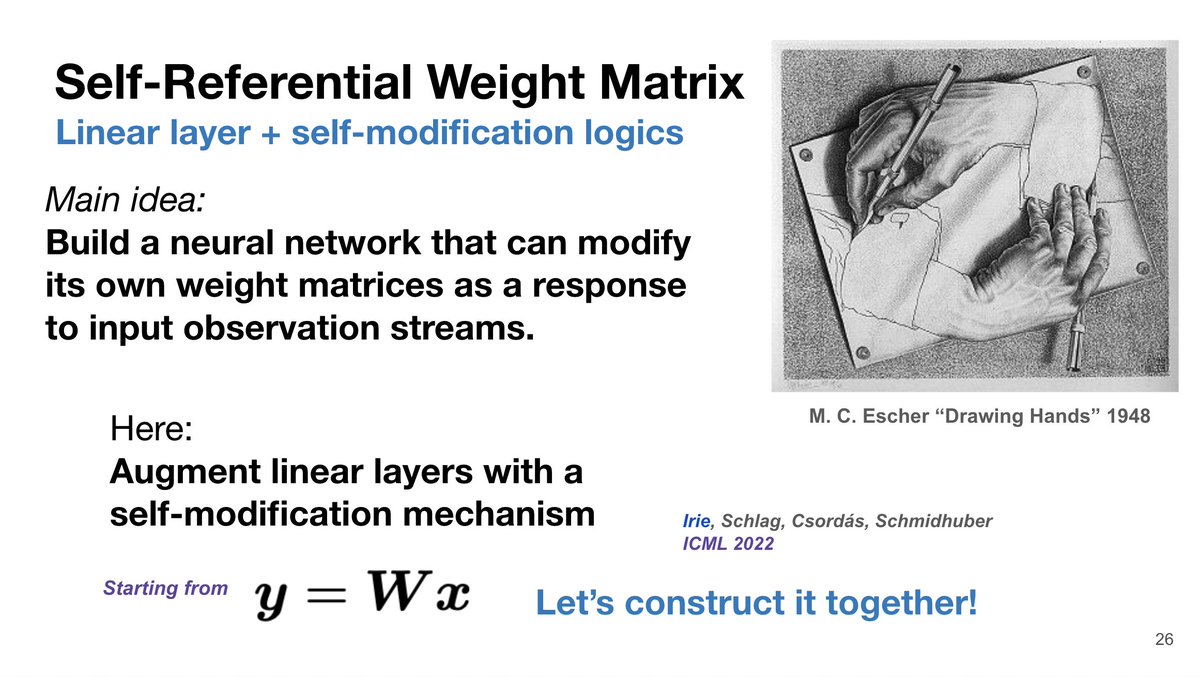
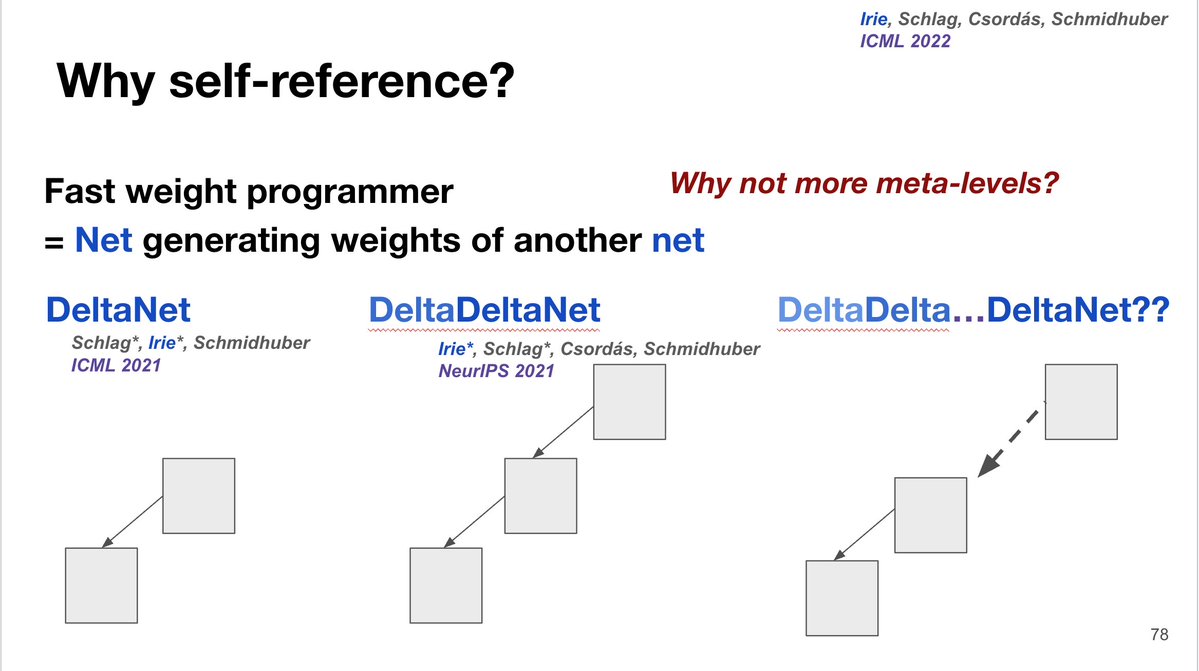

Great to see a workshop like this! I wasn't on X back then: I presented "Training a Weight Matrix to Train Itself" in Mar 2022 at KAUST AI Symp, showing how to turn a linear layer into a recursively self-modifying module--reviving @SchmidhuberAI's self-referential weight matrix.


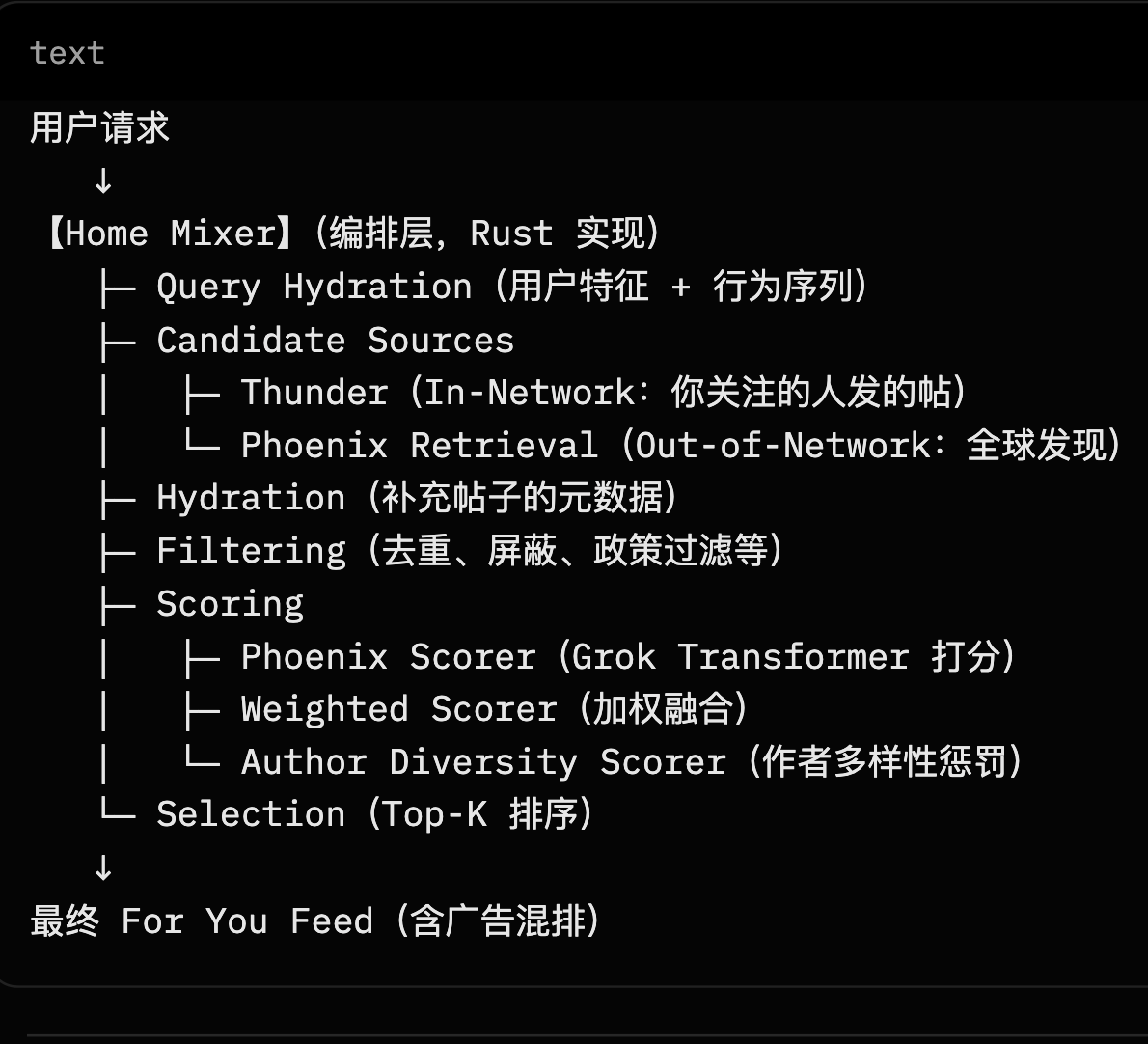
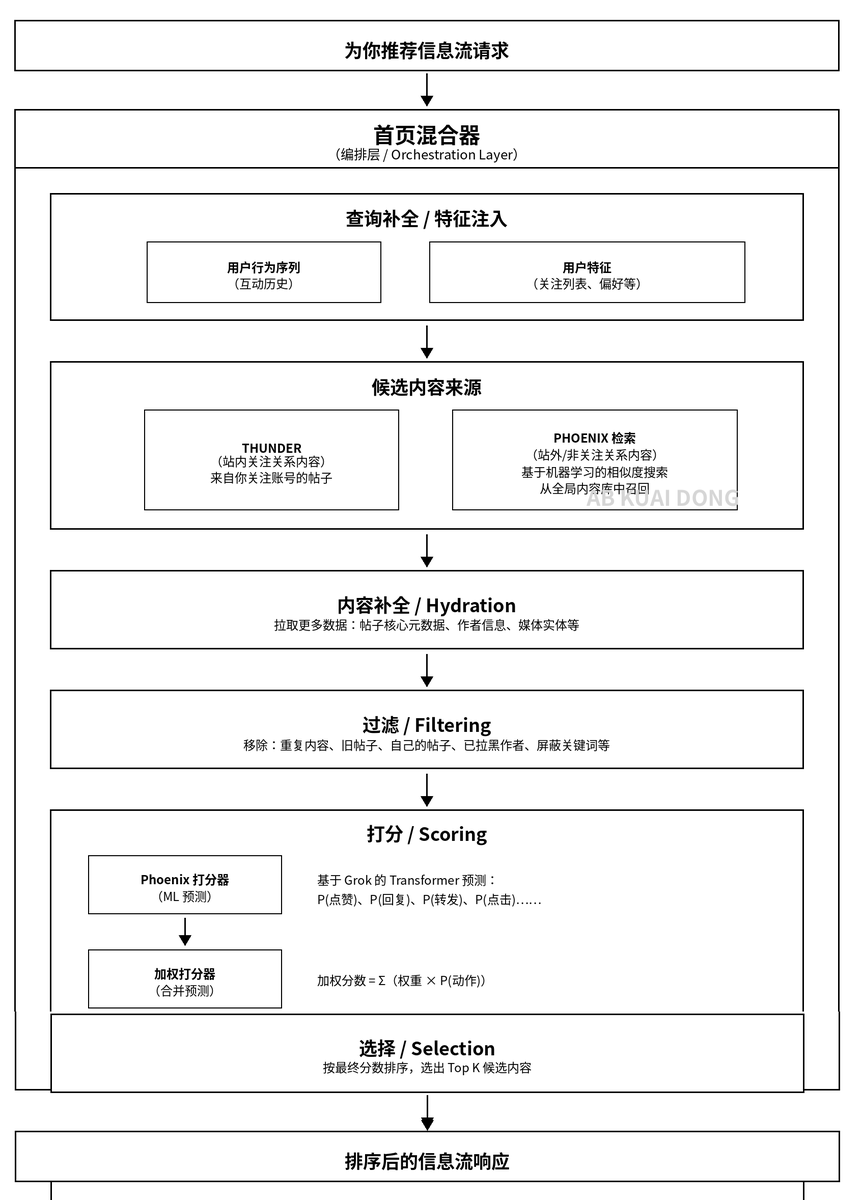
The latest 𝕏 algorithm has been published to GitHub github.com/xai-org/x-algo…




we let opus 4.7 and gpt 5.5 run on the nanogpt optimizer speedrun: ~10k runs, 14k H200 hours, 23.9B tokens. opus hits 2930, codex 2950, both beating the human baseline of 2990. we cover claude autonomy failures, codex high compute usage, and much more primeintellect.ai/auto-nanogpt

Qwen3, GLM-5, and MiMo all use on-policy distillation in post-training. Thinking Machines also wrote it up as a cheap alternative to RL. But in practice it is surprisingly brittle to make work — much more so than SFT or RL. Three recent papers [1, 2, 3] helped me make sense of why. The mechanism is consistent across the failure modes they describe, and it's worth understanding before running another OPD experiment. OPD looks like "match the teacher distribution." But in practice, the update is driven by a very small set of next-token choices at each generation step. Mostly just the handful of tokens that both the student and teacher think are plausible as the next token. Once that small set breaks, OPD breaks. The real object OPD is learning on At every generation step, the model has a huge vocabulary. 150K tokens, maybe more. But almost all of the probability mass sits on a tiny number of tokens. One paper [1] shows that the overlapping high-probability tokens between teacher and student carry around 97–99% of the total probability mass. So although OPD is written as reverse-KL over a full vocabulary, most of the useful learning signal comes from a tiny local menu of next-token options. Here is what I mean by "the handful of tokens." For a given prefix like: "Let's solve this step by step. First, we…" the student may think the next token should be one of: "need", "can", "have", "find", "know", "compute", … The teacher has its own version of this menu. OPD works when these two menus mostly overlap, and when the teacher puts higher probability on better choices inside that menu. It fails for a few different reasons — the menus don't overlap, the menu drifts somewhere bad mid-training, we only look at one item on the menu instead of the whole thing, or the per-position learning signals end up pulling the model in inconsistent directions. Four things can go wrong. The first two are about whether the menu is in good shape. The third is about whether we look at the whole menu or just one item from it. The fourth is about whether the signals across positions combine into a useful update. 1. The student and teacher are thinking in different "languages" A stronger teacher does not necessarily make a better OPD teacher. Li et al. [1] shows this very clearly: a 7B teacher can outperform a 1.5B model on benchmarks, but still fail to improve the 1.5B student through OPD. Why? Because benchmark accuracy measures final answers. OPD trains on next-token probabilities. A stronger model may solve the same problem through a different reasoning path: different intermediate steps, different phrasing, different proof structure, different local token choices. So when the student writes its own partial solution, the teacher may not assign useful probability to the student's next natural steps. The teacher is better overall, but not necessarily helpful on the student's current path. The most interesting experiment is the "reverse distillation", where they take a 1.5B model that was improved by RL — a student that has already moved beyond its original base behavior — and try to distill it back using two teachers: the original pre-RL 1.5B model and a larger 7B model from the same family. Both teachers pull the RL-improved student backward. The student loses its RL gains and regresses toward the older behavior. This sounds surprising at first. But the explanation is simple: OPD does not know that the student's RL behavior is better unless the teacher's token probabilities support it. If the teacher still prefers the old reasoning pattern, OPD will train the student back toward that pattern. So the RL gains disappear not because the teacher is "weak" in benchmark terms, but because the teacher is giving token-level supervision for a behavior the student has already moved past. Benchmark gap does not tell you whether OPD will work. Token-level compatibility does. 2. Repetition becomes locally rewarding Even if OPD starts well, it can still collapse. The most striking failure mode is when training looks fine for a while, then within roughly 30 steps the model starts producing much longer outputs, stops terminating, repetition spikes, and accuracy collapses. The mechanism is counterintuitive at first but makes sense once you see it. In sampled-token OPD, the reward for a token is roughly the teacher's log-probability minus the student's log-probability on that token. So if the teacher gives a token much higher probability than the student does, that token receives a large positive signal. Now imagine the student starts repeating itself. In practice this looks less like coherent sentences repeating and more like degenerate loops — something like "wait, wait, wait, wait, wait" filling the rest of the context. This prefix is bad globally. But locally, it is very predictable. A strong teacher is often very confident about predictable text. Once the loop has gone on for a while, the teacher can assign high probability to the next repeated token. The student may be less confident than the teacher. So the repeated token gets a large positive log-ratio. That means OPD accidentally rewards continuing the repetition. Before repetition starts, repeated tokens are rare, so they don't matter much. But once repetition appears, those tokens become frequent. And because they also receive large positive advantages, they start dominating the update. Luo et al. [2] measures repeated tokens getting 4 to 9 times larger advantage than normal tokens after collapse. Then the loop reinforces itself: more repetition → more predictable prefix → higher teacher confidence → larger positive signal on repeated tokens → even more repetition This is different from the usual length-bias issue in RL. It's more specific — a broken prefix creates locally high-reward repeated tokens, and OPD faithfully amplifies them. 3. We often only look at one item on the menu The clean objective would compare the teacher and student distributions over multiple possible next tokens. But many public OPD recipes — including the ones used industrially — use a cheaper version: Let the student generate one token. Then ask: did the teacher assign this exact token higher or lower probability than the student? If teacher probability is higher, push the student toward it. If lower, push the student away. That is the sampled-token log-ratio. It is cheap because you only score the token the student actually sampled. You do not need to compare the full vocabulary. There is a real reason for this design choice. Full sequence-level reverse-KL is noisy for long generations because an early token update gets entangled with many future rewards. Token-level OPD avoids that by giving each token its own local feedback. That gives much better variance scaling with length [3] — worst-case variance grows as O(T²) for token-level instead of O(T⁴) for sequence-level. So for long reasoning traces, token-level feedback is attractive. The problem is that "one sampled token" is a very noisy view of the teacher's actual next-token preference. At a given step, the teacher may have a whole cluster of reasonable next tokens. But sampled-token OPD only checks the one token the student happened to pick. This creates three problems. First, the student samples tokens from its own distribution, so on most positions the student's probability exceeds the teacher's and the log-ratio is negative. The reward is computed as teacher minus student, and the student is picking tokens where its own log-prob is near its highest — meaning the subtraction is almost always against the student's strongest values. Positive signal only shows up when the student happens to sample a token the teacher likes even more than the student does, which is the minority case. Second, if the student drifts into weird prefixes, the teacher's local probabilities may no longer reflect global quality. Third, tokenization and special-token differences can create fake disagreements. The student and teacher may represent the same text with different token boundaries, so a single-token comparison can look terrible even when the underlying string is fine. The fix proposed in [3] is simple: don't guess the teacher's local preference from one sampled token. Instead, take the teacher's top-k next tokens, renormalize both teacher and student probabilities over that set, and compute reverse-KL there. It's still cheap — you only need the top-k logits, not the whole vocabulary. But it changes the supervision from "did the teacher like this one sampled token?" to "among the teacher's plausible next tokens, does the student put probability mass in the same places?" That is a much better local learning signal. They also add top-p sampling during rollout, so the student is less likely to wander into extremely low-probability prefixes, and mask special tokens to avoid fake tokenization mismatches. 4. Even good token signals may not add up This is the least developed of the four failure modes, and possibly the most important. Li et al. [1] compares a successful OPD setup against a failing one and finds something strange. The failing teacher's per-token advantages are actually larger than the working teacher's, but the gradient norms are smaller. And the failing teacher's sequence-level reward can still distinguish correct from incorrect rollouts, comparable to the working case. So the reward signal is globally informative. It just does not produce useful gradients. Turns out what's going on is that OPD computes a learning signal at every token position in the rollout, and then sums them into one gradient update. Each position's contribution is a vector in parameter space pointing in some direction. So if the per-position vectors mostly point in the same direction, they add up to a big coherent push. But if they point in different directions, they partially cancel when summed, and the model barely moves even though each individual position had something to say. The empirical fingerprint is consistent with the second case: large per-token advantages but small gradient norms after summing — individually strong signals that cancel out when combined. The successful teacher shows the opposite pattern: smaller per-token advantages, larger gradient norms after summing — weaker individual signals that reinforce each other when combined. The paper that raises this leaves it as a hypothesis, but the empirical fingerprint — large per-token advantages, small gradient norms, informative sequence-level reward — is specific enough that it should be testable? What this explains A lot of practical OPD fixes start to look related. SFT cold start helps because it moves the student closer to the teacher's reasoning style before OPD begins. Teacher-aligned prompts help because they put the student in regions where the teacher gives more reliable feedback. KL regularization helps because it prevents the student from drifting too quickly into weird generations. Mixture distillation helps because it keeps some clean reference trajectories in training, so the rollout distribution does not become fully self-generated garbage. Top-k matching helps because it stops pretending one sampled token is enough to represent the teacher's local preference. These look like different tricks. But they are all trying to protect the same thing: the small set of plausible next tokens where teacher and student can actually communicate. The ceiling, and the real open question The more interesting part is long-horizon reasoning. The deeper the student gets into its own generated solution, the more likely the prefix is something the teacher would not have written. And once the teacher is judging prefixes outside its own natural distribution, its token probabilities become less reliable. One paper [1] shows this directly: teacher continuation advantage drops sharply as the student prefix gets longer, from +0.37 at 1K prefix to +0.02 at 16K. That is a bad sign for long-CoT and agentic OPD, because those are exactly the settings where the student spends many steps inside its own partially-generated world. OPD works best when the teacher and student stay close enough that teacher probabilities remain meaningful. Long-horizon agentic training pushes in the opposite direction. This is the open question I would most want to see investigated. The failure modes in sections 1-3 are diagnosable and have proposed fixes. Section 4 is a hypothesis about local gradient structure that should be testable. But the long-horizon ceiling is different — it is about whether OPD's core assumption (the teacher knows something useful about the student's next token) can hold at all when the student is operating many steps inside its own generated world. My current takeaway OPD isn't really a full-vocabulary distribution-matching problem. It's a fragile communication protocol between teacher and student through a tiny local menu of next-token choices. When that menu overlaps, stays clean, and produces gradients that add up, OPD works. When it doesn't, OPD quietly trains the student in the wrong direction. References [1] Li et al. Rethinking On-Policy Distillation of Large Language Models: Phenomenology, Mechanism, and Recipe. arxiv.org/abs/2604.13016 [2] Luo et al. Demystifying OPD: Length Inflation and Stabilization Strategies for Large Language Models. arxiv.org/abs/2604.08527 [3] Fu et al. Revisiting On-Policy Distillation: Empirical Failure Modes and Simple Fixes. arxiv.org/abs/2603.25562

Qwen3, GLM-5, and MiMo all use on-policy distillation in post-training. Thinking Machines also wrote it up as a cheap alternative to RL. But in practice it is surprisingly brittle to make work — much more so than SFT or RL. Three recent papers [1, 2, 3] helped me make sense of why. The mechanism is consistent across the failure modes they describe, and it's worth understanding before running another OPD experiment. OPD looks like "match the teacher distribution." But in practice, the update is driven by a very small set of next-token choices at each generation step. Mostly just the handful of tokens that both the student and teacher think are plausible as the next token. Once that small set breaks, OPD breaks. The real object OPD is learning on At every generation step, the model has a huge vocabulary. 150K tokens, maybe more. But almost all of the probability mass sits on a tiny number of tokens. One paper [1] shows that the overlapping high-probability tokens between teacher and student carry around 97–99% of the total probability mass. So although OPD is written as reverse-KL over a full vocabulary, most of the useful learning signal comes from a tiny local menu of next-token options. Here is what I mean by "the handful of tokens." For a given prefix like: "Let's solve this step by step. First, we…" the student may think the next token should be one of: "need", "can", "have", "find", "know", "compute", … The teacher has its own version of this menu. OPD works when these two menus mostly overlap, and when the teacher puts higher probability on better choices inside that menu. It fails for a few different reasons — the menus don't overlap, the menu drifts somewhere bad mid-training, we only look at one item on the menu instead of the whole thing, or the per-position learning signals end up pulling the model in inconsistent directions. Four things can go wrong. The first two are about whether the menu is in good shape. The third is about whether we look at the whole menu or just one item from it. The fourth is about whether the signals across positions combine into a useful update. 1. The student and teacher are thinking in different "languages" A stronger teacher does not necessarily make a better OPD teacher. Li et al. [1] shows this very clearly: a 7B teacher can outperform a 1.5B model on benchmarks, but still fail to improve the 1.5B student through OPD. Why? Because benchmark accuracy measures final answers. OPD trains on next-token probabilities. A stronger model may solve the same problem through a different reasoning path: different intermediate steps, different phrasing, different proof structure, different local token choices. So when the student writes its own partial solution, the teacher may not assign useful probability to the student's next natural steps. The teacher is better overall, but not necessarily helpful on the student's current path. The most interesting experiment is the "reverse distillation", where they take a 1.5B model that was improved by RL — a student that has already moved beyond its original base behavior — and try to distill it back using two teachers: the original pre-RL 1.5B model and a larger 7B model from the same family. Both teachers pull the RL-improved student backward. The student loses its RL gains and regresses toward the older behavior. This sounds surprising at first. But the explanation is simple: OPD does not know that the student's RL behavior is better unless the teacher's token probabilities support it. If the teacher still prefers the old reasoning pattern, OPD will train the student back toward that pattern. So the RL gains disappear not because the teacher is "weak" in benchmark terms, but because the teacher is giving token-level supervision for a behavior the student has already moved past. Benchmark gap does not tell you whether OPD will work. Token-level compatibility does. 2. Repetition becomes locally rewarding Even if OPD starts well, it can still collapse. The most striking failure mode is when training looks fine for a while, then within roughly 30 steps the model starts producing much longer outputs, stops terminating, repetition spikes, and accuracy collapses. The mechanism is counterintuitive at first but makes sense once you see it. In sampled-token OPD, the reward for a token is roughly the teacher's log-probability minus the student's log-probability on that token. So if the teacher gives a token much higher probability than the student does, that token receives a large positive signal. Now imagine the student starts repeating itself. In practice this looks less like coherent sentences repeating and more like degenerate loops — something like "wait, wait, wait, wait, wait" filling the rest of the context. This prefix is bad globally. But locally, it is very predictable. A strong teacher is often very confident about predictable text. Once the loop has gone on for a while, the teacher can assign high probability to the next repeated token. The student may be less confident than the teacher. So the repeated token gets a large positive log-ratio. That means OPD accidentally rewards continuing the repetition. Before repetition starts, repeated tokens are rare, so they don't matter much. But once repetition appears, those tokens become frequent. And because they also receive large positive advantages, they start dominating the update. Luo et al. [2] measures repeated tokens getting 4 to 9 times larger advantage than normal tokens after collapse. Then the loop reinforces itself: more repetition → more predictable prefix → higher teacher confidence → larger positive signal on repeated tokens → even more repetition This is different from the usual length-bias issue in RL. It's more specific — a broken prefix creates locally high-reward repeated tokens, and OPD faithfully amplifies them. 3. We often only look at one item on the menu The clean objective would compare the teacher and student distributions over multiple possible next tokens. But many public OPD recipes — including the ones used industrially — use a cheaper version: Let the student generate one token. Then ask: did the teacher assign this exact token higher or lower probability than the student? If teacher probability is higher, push the student toward it. If lower, push the student away. That is the sampled-token log-ratio. It is cheap because you only score the token the student actually sampled. You do not need to compare the full vocabulary. There is a real reason for this design choice. Full sequence-level reverse-KL is noisy for long generations because an early token update gets entangled with many future rewards. Token-level OPD avoids that by giving each token its own local feedback. That gives much better variance scaling with length [3] — worst-case variance grows as O(T²) for token-level instead of O(T⁴) for sequence-level. So for long reasoning traces, token-level feedback is attractive. The problem is that "one sampled token" is a very noisy view of the teacher's actual next-token preference. At a given step, the teacher may have a whole cluster of reasonable next tokens. But sampled-token OPD only checks the one token the student happened to pick. This creates three problems. First, the student samples tokens from its own distribution, so on most positions the student's probability exceeds the teacher's and the log-ratio is negative. The reward is computed as teacher minus student, and the student is picking tokens where its own log-prob is near its highest — meaning the subtraction is almost always against the student's strongest values. Positive signal only shows up when the student happens to sample a token the teacher likes even more than the student does, which is the minority case. Second, if the student drifts into weird prefixes, the teacher's local probabilities may no longer reflect global quality. Third, tokenization and special-token differences can create fake disagreements. The student and teacher may represent the same text with different token boundaries, so a single-token comparison can look terrible even when the underlying string is fine. The fix proposed in [3] is simple: don't guess the teacher's local preference from one sampled token. Instead, take the teacher's top-k next tokens, renormalize both teacher and student probabilities over that set, and compute reverse-KL there. It's still cheap — you only need the top-k logits, not the whole vocabulary. But it changes the supervision from "did the teacher like this one sampled token?" to "among the teacher's plausible next tokens, does the student put probability mass in the same places?" That is a much better local learning signal. They also add top-p sampling during rollout, so the student is less likely to wander into extremely low-probability prefixes, and mask special tokens to avoid fake tokenization mismatches. 4. Even good token signals may not add up This is the least developed of the four failure modes, and possibly the most important. Li et al. [1] compares a successful OPD setup against a failing one and finds something strange. The failing teacher's per-token advantages are actually larger than the working teacher's, but the gradient norms are smaller. And the failing teacher's sequence-level reward can still distinguish correct from incorrect rollouts, comparable to the working case. So the reward signal is globally informative. It just does not produce useful gradients. Turns out what's going on is that OPD computes a learning signal at every token position in the rollout, and then sums them into one gradient update. Each position's contribution is a vector in parameter space pointing in some direction. So if the per-position vectors mostly point in the same direction, they add up to a big coherent push. But if they point in different directions, they partially cancel when summed, and the model barely moves even though each individual position had something to say. The empirical fingerprint is consistent with the second case: large per-token advantages but small gradient norms after summing — individually strong signals that cancel out when combined. The successful teacher shows the opposite pattern: smaller per-token advantages, larger gradient norms after summing — weaker individual signals that reinforce each other when combined. The paper that raises this leaves it as a hypothesis, but the empirical fingerprint — large per-token advantages, small gradient norms, informative sequence-level reward — is specific enough that it should be testable? What this explains A lot of practical OPD fixes start to look related. SFT cold start helps because it moves the student closer to the teacher's reasoning style before OPD begins. Teacher-aligned prompts help because they put the student in regions where the teacher gives more reliable feedback. KL regularization helps because it prevents the student from drifting too quickly into weird generations. Mixture distillation helps because it keeps some clean reference trajectories in training, so the rollout distribution does not become fully self-generated garbage. Top-k matching helps because it stops pretending one sampled token is enough to represent the teacher's local preference. These look like different tricks. But they are all trying to protect the same thing: the small set of plausible next tokens where teacher and student can actually communicate. The ceiling, and the real open question The more interesting part is long-horizon reasoning. The deeper the student gets into its own generated solution, the more likely the prefix is something the teacher would not have written. And once the teacher is judging prefixes outside its own natural distribution, its token probabilities become less reliable. One paper [1] shows this directly: teacher continuation advantage drops sharply as the student prefix gets longer, from +0.37 at 1K prefix to +0.02 at 16K. That is a bad sign for long-CoT and agentic OPD, because those are exactly the settings where the student spends many steps inside its own partially-generated world. OPD works best when the teacher and student stay close enough that teacher probabilities remain meaningful. Long-horizon agentic training pushes in the opposite direction. This is the open question I would most want to see investigated. The failure modes in sections 1-3 are diagnosable and have proposed fixes. Section 4 is a hypothesis about local gradient structure that should be testable. But the long-horizon ceiling is different — it is about whether OPD's core assumption (the teacher knows something useful about the student's next token) can hold at all when the student is operating many steps inside its own generated world. My current takeaway OPD isn't really a full-vocabulary distribution-matching problem. It's a fragile communication protocol between teacher and student through a tiny local menu of next-token choices. When that menu overlaps, stays clean, and produces gradients that add up, OPD works. When it doesn't, OPD quietly trains the student in the wrong direction. References [1] Li et al. Rethinking On-Policy Distillation of Large Language Models: Phenomenology, Mechanism, and Recipe. arxiv.org/abs/2604.13016 [2] Luo et al. Demystifying OPD: Length Inflation and Stabilization Strategies for Large Language Models. arxiv.org/abs/2604.08527 [3] Fu et al. Revisiting On-Policy Distillation: Empirical Failure Modes and Simple Fixes. arxiv.org/abs/2603.25562








如何用20美金买到2个GPT的Team账号,今天给大家出一个可以支付成功的详细教程(收藏级别) 官方的优惠活动跟本地IP等都没太大关系,只跟邀请链接有关,如果A邀请链接不行,就用B邀请链接。 关于支付,一般的国内Visa信用卡、虚拟卡我都试了,根本过不去,提示:付款未获批准 。 然后在朋友的帮助下我尝试了下面方法,秒过,成功用20美金买到了2个ChatGPT的Team账号。 下面进入正式的教程,支付直接秒过。

𝐋𝐞𝐚𝐫𝐧𝐢𝐧𝐠 𝐚 𝐰𝐨𝐫𝐥𝐝 𝐦𝐨𝐝𝐞𝐥 𝐢𝐧 𝐚 𝐥𝐚𝐭𝐞𝐧𝐭 𝐬𝐩𝐚𝐜𝐞 𝐜𝐚𝐩𝐭𝐮𝐫𝐢𝐧𝐠 𝐬𝐭𝐚𝐭𝐞 𝐞𝐯𝐨𝐥𝐮𝐭𝐢𝐨𝐧, 𝐮𝐬𝐞 𝐢𝐭 𝐟𝐨𝐫 𝐰𝐨𝐫𝐥𝐝 𝐚𝐜𝐭𝐢𝐨𝐧 𝐦𝐨𝐝𝐞𝐥 𝐚𝐧𝐝 𝐯𝐢𝐬𝐮𝐚𝐥 𝐫𝐞𝐢𝐧𝐟𝐨𝐫𝐜𝐞𝐦𝐞𝐧𝐭 𝐥𝐞𝐚𝐫𝐧𝐢𝐧𝐠. 🚀 Introduce RLA-WM, a simple and efficient state-of-the-art world model. ✂️ RLA-WM decouples a world action model from the video backbone, and enables the first demonstration 🎬 of visual reinforcement learning entirely inside our world model, learned only from videos (𝚆̲orld 𝙼̲odel‑based 𝚁̲𝙻̲). ⚡ Talk is cheap, open the notebook in Colab ▶️ to run RLA-WM and WMRL in a single T4 GPU! 🌐 Website 📄 Paper: mlzxy.github.io/rla-wm ▶️ Colab: colab.research.google.com/github/mlzxy/r… 👏 Our work, "𝗟𝗲𝗮𝗿𝗻𝗶𝗻𝗴 𝗩𝗶𝘀𝘂𝗮𝗹 𝗙𝗲𝗮𝘁𝘂𝗿𝗲-𝗕𝗮𝘀𝗲𝗱 𝗪𝗼𝗿𝗹𝗱 𝗠𝗼𝗱𝗲𝗹𝘀 𝘃𝗶𝗮 𝗥𝗲𝘀𝗶𝗱𝘂𝗮𝗹 𝗟𝗮𝘁𝗲𝗻𝘁 𝗔𝗰𝘁𝗶𝗼𝗻", is a collaborative effort by computer vision and robotics researchers from Rutgers University, Purdue University, and the University of Wisconsin‑Madison. Shoutout to my amazing collaborators! @XuZhengtong , Yutian Tao, @YepingWang , @yushe_1 , @ABoularias




As an AI Engineer. Please learn: - Harness engineering, not just prompt engineering - Prompt caching vs. semantic caching tradeoffs - KV cache management at scale - Speculative decoding vs quantization - Structured output failures & fallback chains - Evals (LLM-as-judge + human evals) - Cost attribution per feature, not just per model - Agent guardrails & loop budgets - LLM observability as a first-class discipline - Model routing & graceful fallback logic - Knowing when to fine-tune vs. in-context learning


If you love fine-tuning open-source models (like me), then listen. > Start with 1B, 2B, 4B, and 8B models. (Don't start with a 27B model or bigger at first.) > Use WebGPU providers. I use Google Colab Pro for any model smaller than 9B. A single A100 80GB costs around $0.60/hr, which is cheap. Enough for small models. > Don’t buy GPUs unless you fine-tune 7 to 10 models. You'll understand the nitty-gritty in the process. > Use Codex 5.5 × DeepSeek v4 Pro to create datasets. Codex to plan, DeepSeek v4 Pro to generate rows. > Use Unsloth's instruct models as a base from Hugging Face. Yes, there are others too, but Unsloth also provides fast fine-tuning notebooks. > Use Unsloth's fine-tuning notebooks as a reference. Paste them into Codex, and Codex will write a custom notebook with the configs you need. > Spend 1 day learning about: - SFT (supervised fine-tuning) - RL training (GRPO, DPO, PPO, etc.) - LoRA / QLoRA training - Quantization and types - Local inference engines (llama.cpp) - KV cache and prompt cache > Just get started. Claude, Codex, and ChatGPT can design a step-by-step plan for how you can fine-tune your first AI model. Future tech is moving toward small 5B to 15B ELMs (Expert Language Models) rather than general 1T LLMs. So fine-tuning is an important skill that anyone can acquire today. Tune models, test them, use them. Then fine-tune for companies and make a career out of it. (Companies pay $50k+ to fine-tune models on their data so they can get personalized AI models.) Shoot your questions below. I'll be sharing in-depth raw findings about this topic in the coming days.