Sabitlenmiş Tweet

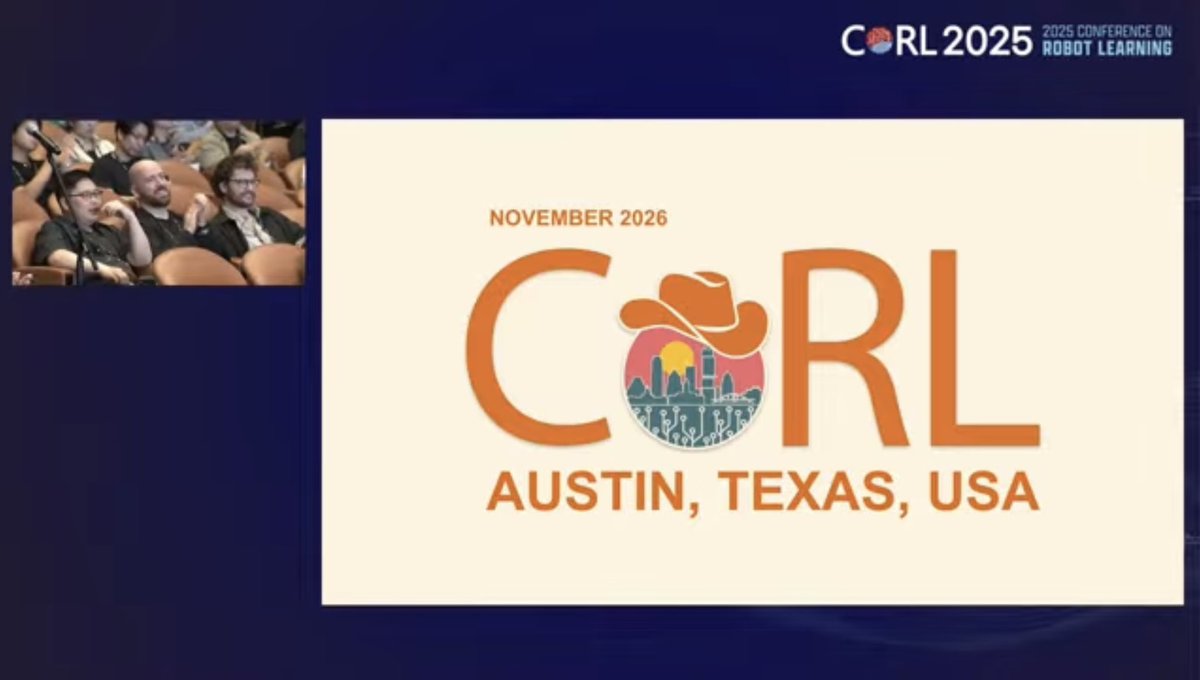
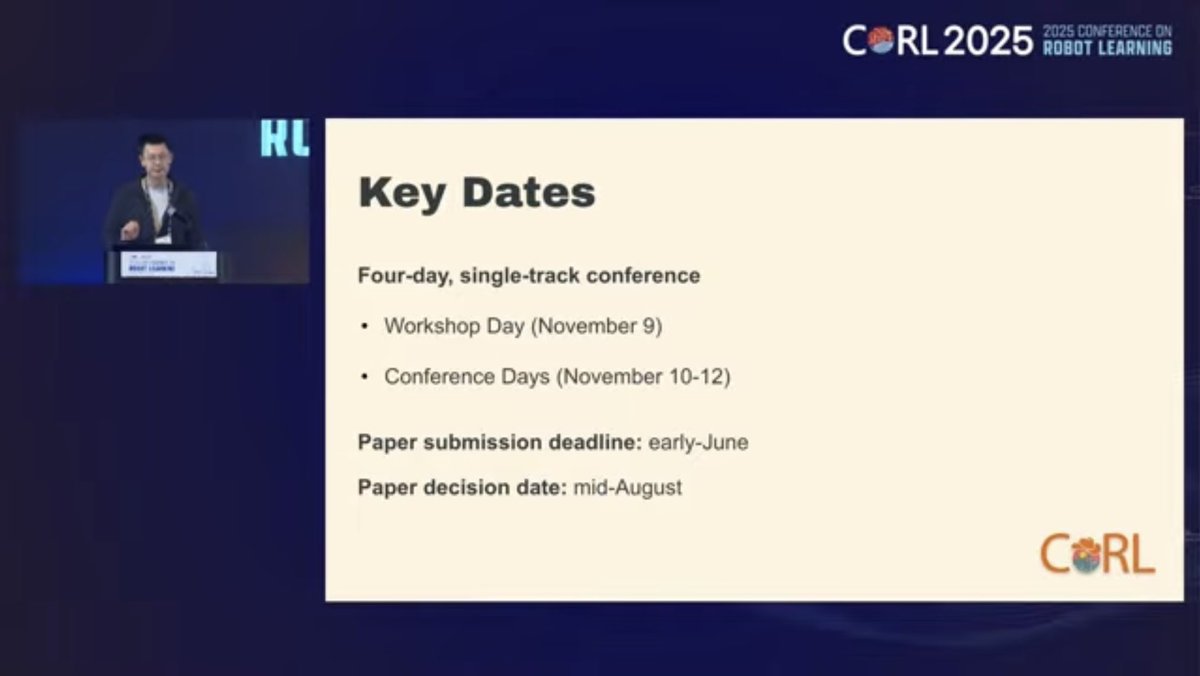
Next year @corl_conf will be held in Austin, TX!
November 9-12, 2026


Kyle🤖🚀🦭@KyleMorgenstein
Chat if people come up to you the day after to talk about your karaoke performance of Thrift Shop is that good or bad Anyways, had a blast at CoRL/Humanoids. Next year in Austin!! 🤠
English