Sabitlenmiş Tweet

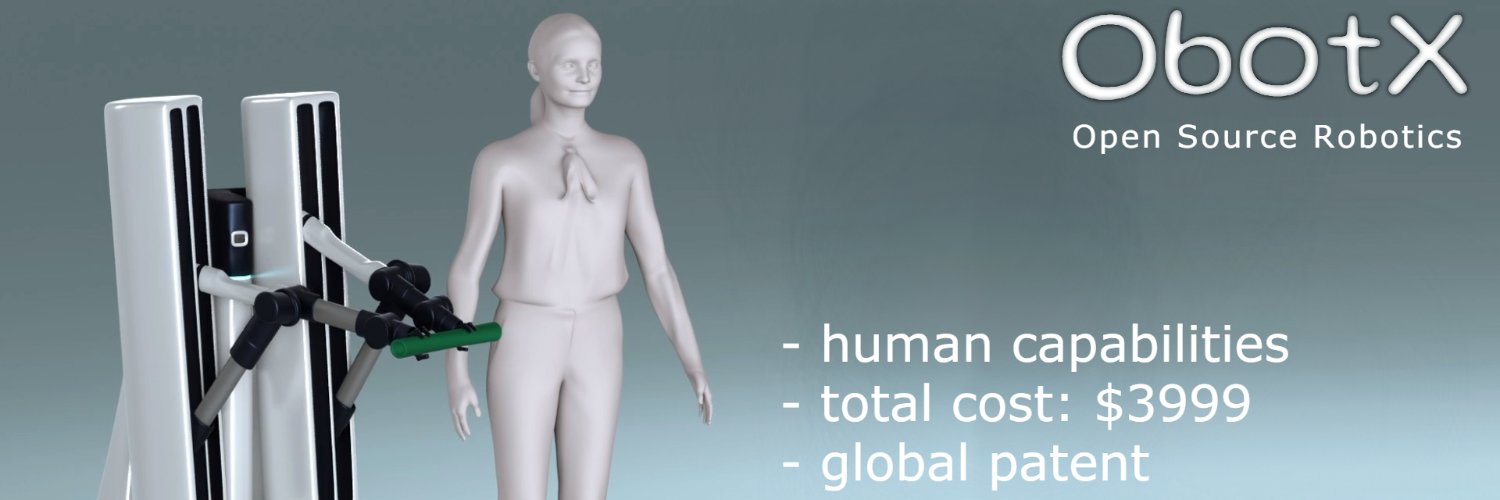
Our blueprint for the "Optimal Universal Robot":
❌ Legs: Too complex, too expensive. ✅ Wheels: Fast, stable, 10x cheaper.
❌ Rotary Joints: Massive torque stress, custom gears. ✅ Of the shelf parts & linear actuators: High payload, extrem simplicity, off-the-shelf parts.
English